I use it to do Objection, but if I set the camera not parallel to the plane I want the z value of the camera to be like the camera is parallel to the plane. What do I have to do?
Hello @thnnathat
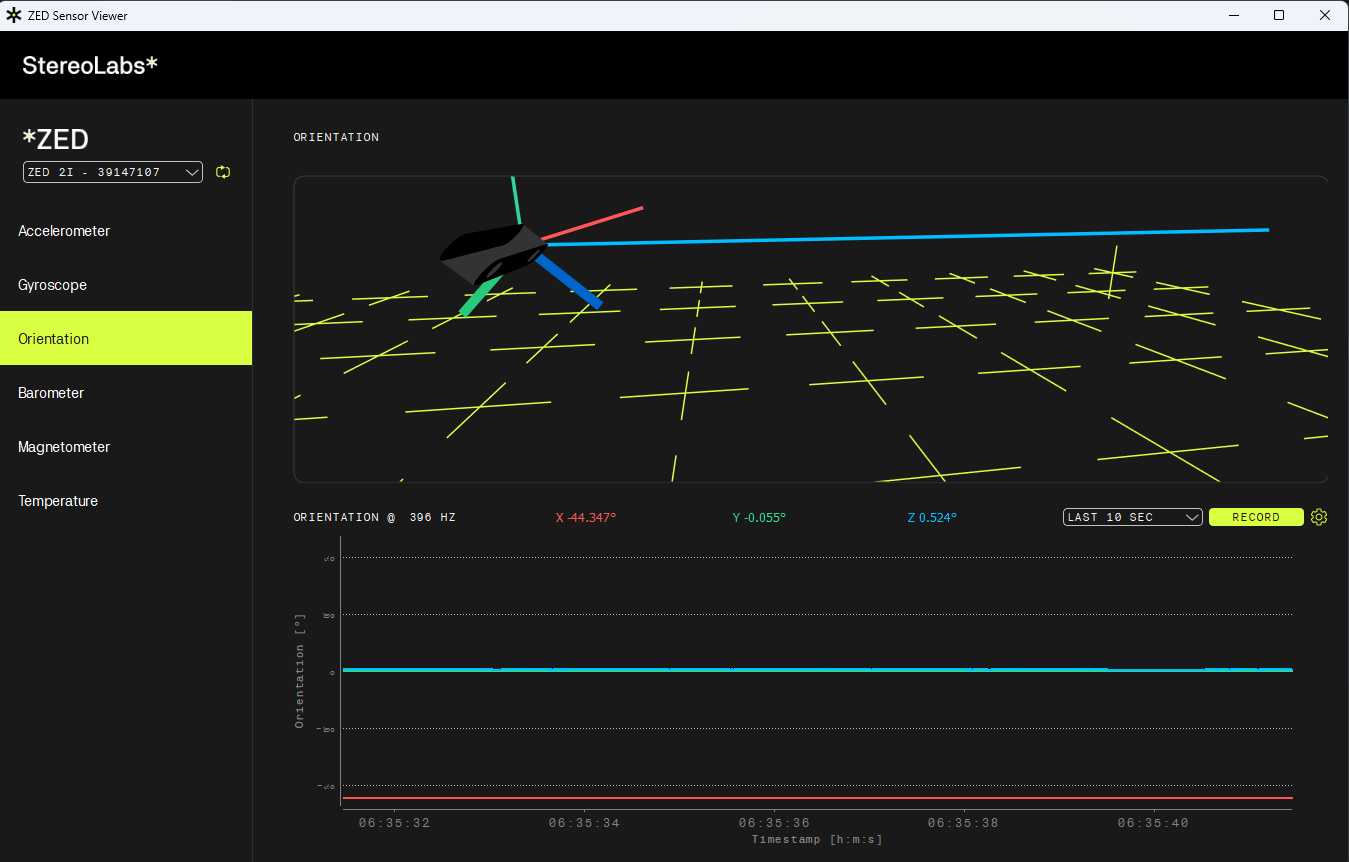
I think you want to be in the WORLD reference frame (RuntimeParameters), and initialize the positional tracking with the set_gravity_as_origin set to true.
This will use the on-board IMU to make the “horizontal plane” parallel to the ground.