I don’t have any need for tracking objects or object detection. I see that the positional tracking parameters have an option for world frame points, but they only apply to object position (as my understanding). Am I to use this somehow?
if zed.grab(runtime_parameters) == sl.ERROR_CODE.SUCCESS:
zed.retrieve_measure(point_cloud, sl.MEASURE.XYZRGBA)
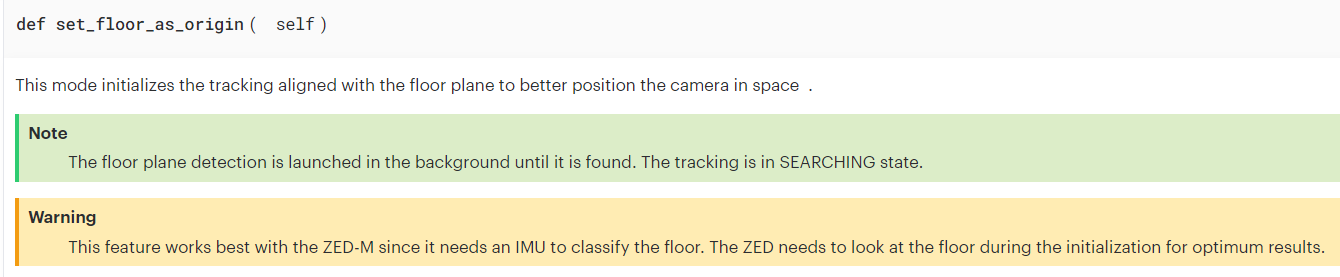
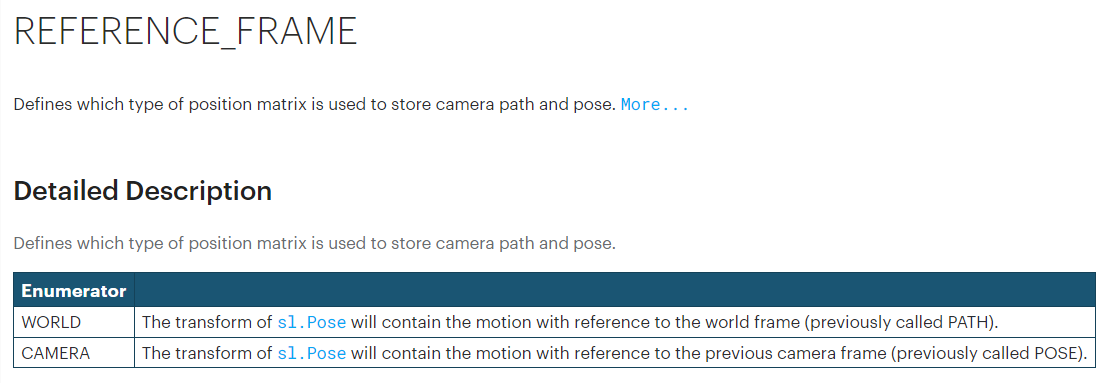
This code grabs point cloud information with camera at origin. I would like this to grab point cloud information with “world frame” reference with floor as origin somehow.