Hi,
I got the z be negative…
Person ID = 9 [ 0.54632825 -0.25366327 -2.94440794]
Person ID = 9 [ 0.53793859 -0.25392723 -2.94371223]
Based on the object detection sample,
I’ve added
positional_tracking_parameters.set_as_static = True
positional_tracking_parameters.set_floor_as_origin = True
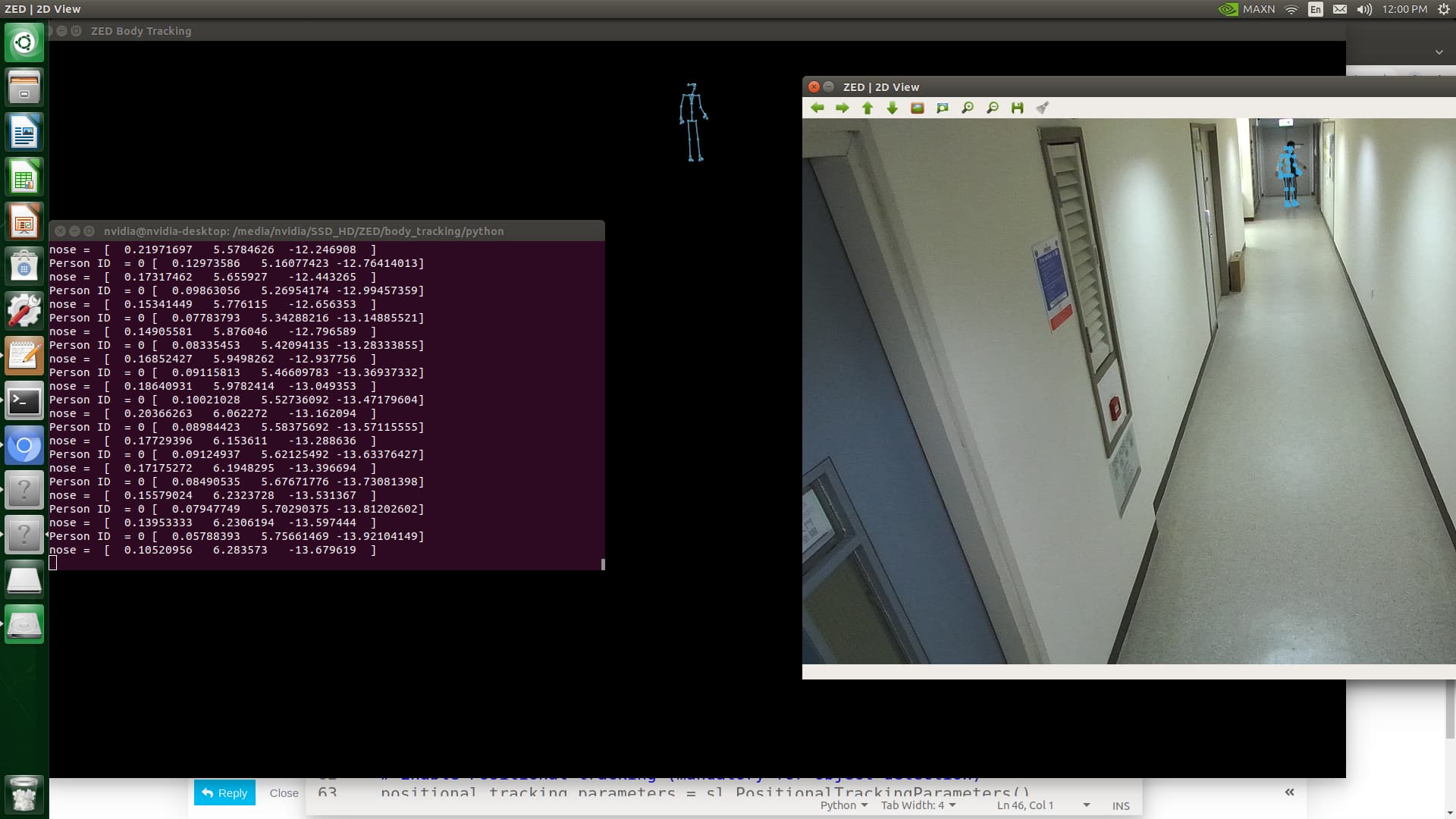
And then print out the object x y z. (May be I print it wrong?? The object is 3m away…)
for object in objects.object_list:
print("Person ID = {} {}".format(object.id, object.position))
How can I know if the floor is detected? Note: when I use the plane_detection example, I can see the green mesh when I click the space bar. So, even my lab is messy, the floor can be detected I guess.
How to modify the object detection code so that I can see the green floor? I have a hard time reading the OpenGL python code in plane detection. Is there any link of the cloud window display? Thx
And when I comment out “positional_tracking_parameters.set_floor_as_origin = True”
The x y z is more or less the same…
Person ID = 0 [ 0.52168459 -0.25106254 -2.98486495]
Person ID = 0 [ 0.5406729 -0.2512401 -2.98334646]
Btw, my ZED is pointing a little downward, it shouldn’t matter right? As soon as it can detect the floor…
Thx
And When I put the object on the floor
Person ID = 6 [ 0.4964152 -0.7681551 -2.62042546]
Person ID = 6 [ 0.49598047 -0.7681368 -2.61898327]
Person ID = 6 [ 0.49580163 -0.76822615 -2.6143527 ]
So, the the middle value is the height? And the last value is the distance to the camera? I am a little confuse with the coordinate. is there any link about it?
If I put it on the floor, why the middle value is more negative…?
Note: Before, the object is on a chair.
Thx
Below is the full code.
########################################################################
#
# Copyright (c) 2022, STEREOLABS.
#
# All rights reserved.
#
# THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
# "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
# LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
# A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
# OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
# SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
# LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
# DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
# THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
# (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
# OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
#
########################################################################
"""
This sample demonstrates how to capture 3D point cloud and detected objects
with the ZED SDK and display the result in an OpenGL window.
"""
import sys
import numpy as np
import cv2
import pyzed.sl as sl
import ogl_viewer.viewer as gl
import cv_viewer.tracking_viewer as cv_viewer
from batch_system_handler import *
##
# Variable to enable/disable the batch option in Object Detection module
# Batching system allows to reconstruct trajectories from the object detection module by adding Re-Identification / Appareance matching.
# For example, if an object is not seen during some time, it can be re-ID to a previous ID if the matching score is high enough
# Use with caution if image retention is activated (See batch_system_handler.py) :
# --> Images will only appear if an object is detected since the batching system is based on OD detection.
USE_BATCHING = False
if __name__ == "__main__":
print("Running object detection ... Press 'Esc' to quit")
zed = sl.Camera()
# Create a InitParameters object and set configuration parameters
init_params = sl.InitParameters()
init_params.camera_resolution = sl.RESOLUTION.HD1080
init_params.coordinate_units = sl.UNIT.METER
init_params.coordinate_system = sl.COORDINATE_SYSTEM.RIGHT_HANDED_Y_UP
init_params.depth_mode = sl.DEPTH_MODE.ULTRA
init_params.depth_maximum_distance = 20
is_playback = False # Defines if an SVO is used
# If applicable, use the SVO given as parameter
# Otherwise use ZED live stream
if len(sys.argv) == 2:
filepath = sys.argv[1]
print("Using SVO file: {0}".format(filepath))
init_params.svo_real_time_mode = True
init_params.set_from_svo_file(filepath)
is_playback = True
status = zed.open(init_params)
if status != sl.ERROR_CODE.SUCCESS:
print(repr(status))
exit()
# Enable positional tracking module
positional_tracking_parameters = sl.PositionalTrackingParameters()
# If the camera is static in space, enabling this setting below provides better depth quality and faster computation
positional_tracking_parameters.set_as_static = True
positional_tracking_parameters.set_floor_as_origin = True
zed.enable_positional_tracking(positional_tracking_parameters)
# Enable object detection module
batch_parameters = sl.BatchParameters()
if USE_BATCHING:
batch_parameters.enable = True
batch_parameters.latency = 2.0
batch_handler = BatchSystemHandler(batch_parameters.latency*2)
else:
batch_parameters.enable = False
obj_param = sl.ObjectDetectionParameters(batch_trajectories_parameters=batch_parameters)
obj_param.detection_model = sl.DETECTION_MODEL.MULTI_CLASS_BOX
# Defines if the object detection will track objects across images flow.
obj_param.enable_tracking = True
zed.enable_object_detection(obj_param)
camera_infos = zed.get_camera_information()
# Create OpenGL viewer
viewer = gl.GLViewer()
point_cloud_res = sl.Resolution(min(camera_infos.camera_resolution.width, 720), min(camera_infos.camera_resolution.height, 404))
point_cloud_render = sl.Mat()
viewer.init(camera_infos.camera_model, point_cloud_res, obj_param.enable_tracking)
# Configure object detection runtime parameters
obj_runtime_param = sl.ObjectDetectionRuntimeParameters()
detection_confidence = 10#60
obj_runtime_param.detection_confidence_threshold = detection_confidence
# To select a set of specific object classes
obj_runtime_param.object_class_filter = [sl.OBJECT_CLASS.PERSON]
# To set a specific threshold
obj_runtime_param.object_class_detection_confidence_threshold = {sl.OBJECT_CLASS.PERSON: detection_confidence}
# Runtime parameters
runtime_params = sl.RuntimeParameters()
runtime_params.confidence_threshold = 10#50
# Create objects that will store SDK outputs
point_cloud = sl.Mat(point_cloud_res.width, point_cloud_res.height, sl.MAT_TYPE.F32_C4, sl.MEM.CPU)
objects = sl.Objects()
image_left = sl.Mat()
# Utilities for 2D display
display_resolution = sl.Resolution(min(camera_infos.camera_resolution.width, 1280), min(camera_infos.camera_resolution.height, 720))
image_scale = [display_resolution.width / camera_infos.camera_resolution.width
, display_resolution.height / camera_infos.camera_resolution.height]
image_left_ocv = np.full((display_resolution.height, display_resolution.width, 4), [245, 239, 239,255], np.uint8)
# Utilities for tracks view
camera_config = zed.get_camera_information().camera_configuration
tracks_resolution = sl.Resolution(400, display_resolution.height)
track_view_generator = cv_viewer.TrackingViewer(tracks_resolution, camera_config.camera_fps, init_params.depth_maximum_distance)
track_view_generator.set_camera_calibration(camera_config.calibration_parameters)
image_track_ocv = np.zeros((tracks_resolution.height, tracks_resolution.width, 4), np.uint8)
# Will store the 2D image and tracklet views
global_image = np.full((display_resolution.height, display_resolution.width+tracks_resolution.width, 4), [245, 239, 239,255], np.uint8)
# Camera pose
cam_w_pose = sl.Pose()
cam_c_pose = sl.Pose()
quit_app = False
while(viewer.is_available() and (quit_app == False)):
if zed.grab(runtime_params) == sl.ERROR_CODE.SUCCESS:
# Retrieve objects
returned_state = zed.retrieve_objects(objects, obj_runtime_param)
if (returned_state == sl.ERROR_CODE.SUCCESS and objects.is_new):
# Retrieve point cloud
zed.retrieve_measure(point_cloud, sl.MEASURE.XYZRGBA,sl.MEM.CPU, point_cloud_res)
point_cloud.copy_to(point_cloud_render)
# Retrieve image
zed.retrieve_image(image_left, sl.VIEW.LEFT, sl.MEM.CPU, display_resolution)
image_render_left = image_left.get_data()
# Get camera pose
zed.get_position(cam_w_pose, sl.REFERENCE_FRAME.WORLD)
update_render_view = True
update_3d_view = True
update_tracking_view = True
if USE_BATCHING:
zed.get_position(cam_c_pose, sl.REFERENCE_FRAME.CAMERA)
objects_batch = []
zed.get_objects_batch(objects_batch)
batch_handler.push(cam_c_pose,cam_w_pose,image_left,point_cloud,objects_batch)
cam_c_pose, cam_w_pose, image_left, point_cloud_render, objects = batch_handler.pop(cam_c_pose,cam_w_pose,image_left,point_cloud,objects)
image_render_left = image_left.get_data()
update_tracking_view = objects.is_new
if WITH_IMAGE_RETENTION:
update_render_view = objects.is_new
update_3d_view = objects.is_new
else:
update_render_view = True
update_3d_view = True
#####################
for object in objects.object_list:
print("Person ID = {} {}".format(object.id, object.position))
#######################
# 3D rendering
if update_3d_view:
viewer.updateData(point_cloud_render, objects)
# 2D rendering
if update_render_view:
np.copyto(image_left_ocv,image_render_left)
cv_viewer.render_2D(image_left_ocv,image_scale,objects, obj_param.enable_tracking)
global_image = cv2.hconcat([image_left_ocv,image_track_ocv])
# Tracking view
if update_tracking_view:
track_view_generator.generate_view(objects, cam_w_pose, image_track_ocv, objects.is_tracked)
cv2.imshow("ZED | 2D View and Birds View",global_image)
cv2.waitKey(10)
if (is_playback and (zed.get_svo_position() == zed.get_svo_number_of_frames()-1)):
print("End of SVO")
quit_app = True
cv2.destroyAllWindows()
viewer.exit()
image_left.free(sl.MEM.CPU)
point_cloud.free(sl.MEM.CPU)
point_cloud_render.free(sl.MEM.CPU)
if USE_BATCHING:
batch_handler.clear()
# Disable modules and close camera
zed.disable_object_detection()
zed.disable_positional_tracking()
zed.close()

")