Hi, my friends. i got a problem that how to convert sl::Mat point cloud to pcl::PointCloud.
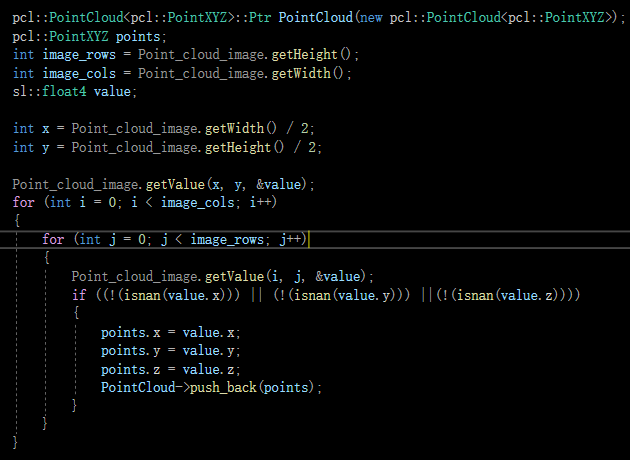
The method i used to convert it shows in picture. But it spend much times,and a lot of points in the sl::Mat
is NAN, do you have a approach to convert it efficiently?
Please help.Thanks!