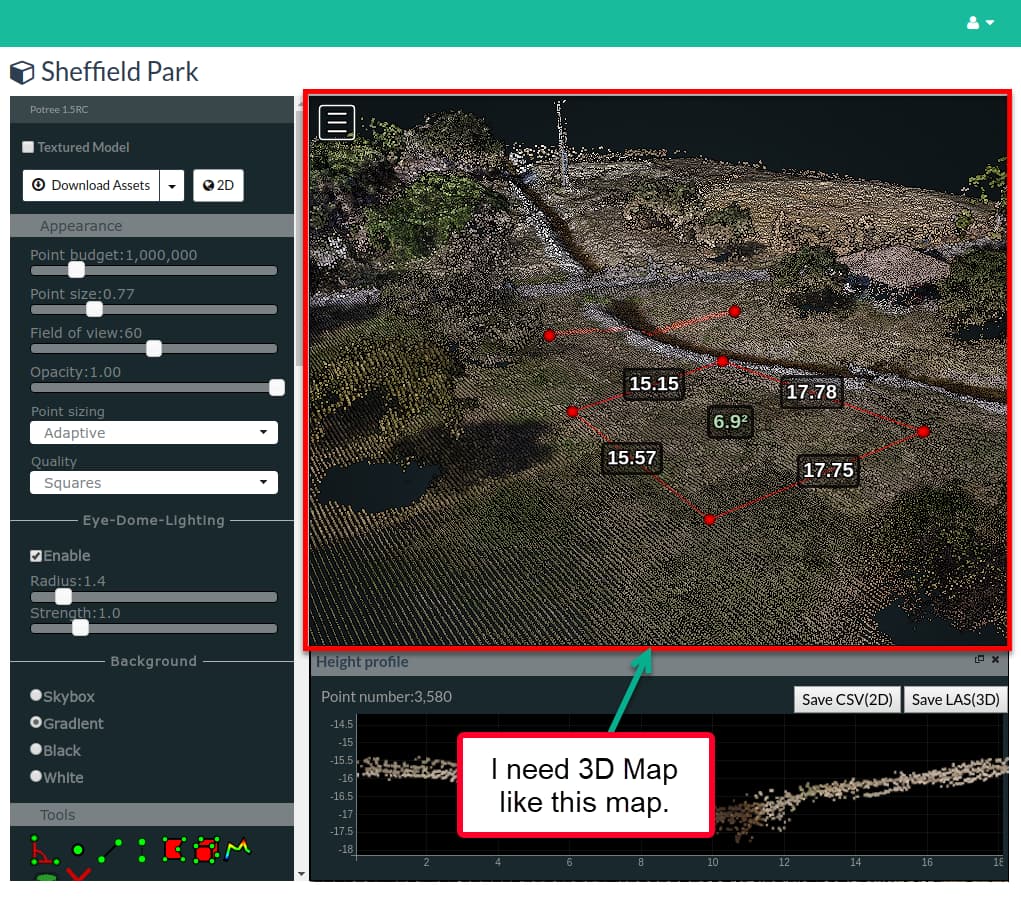
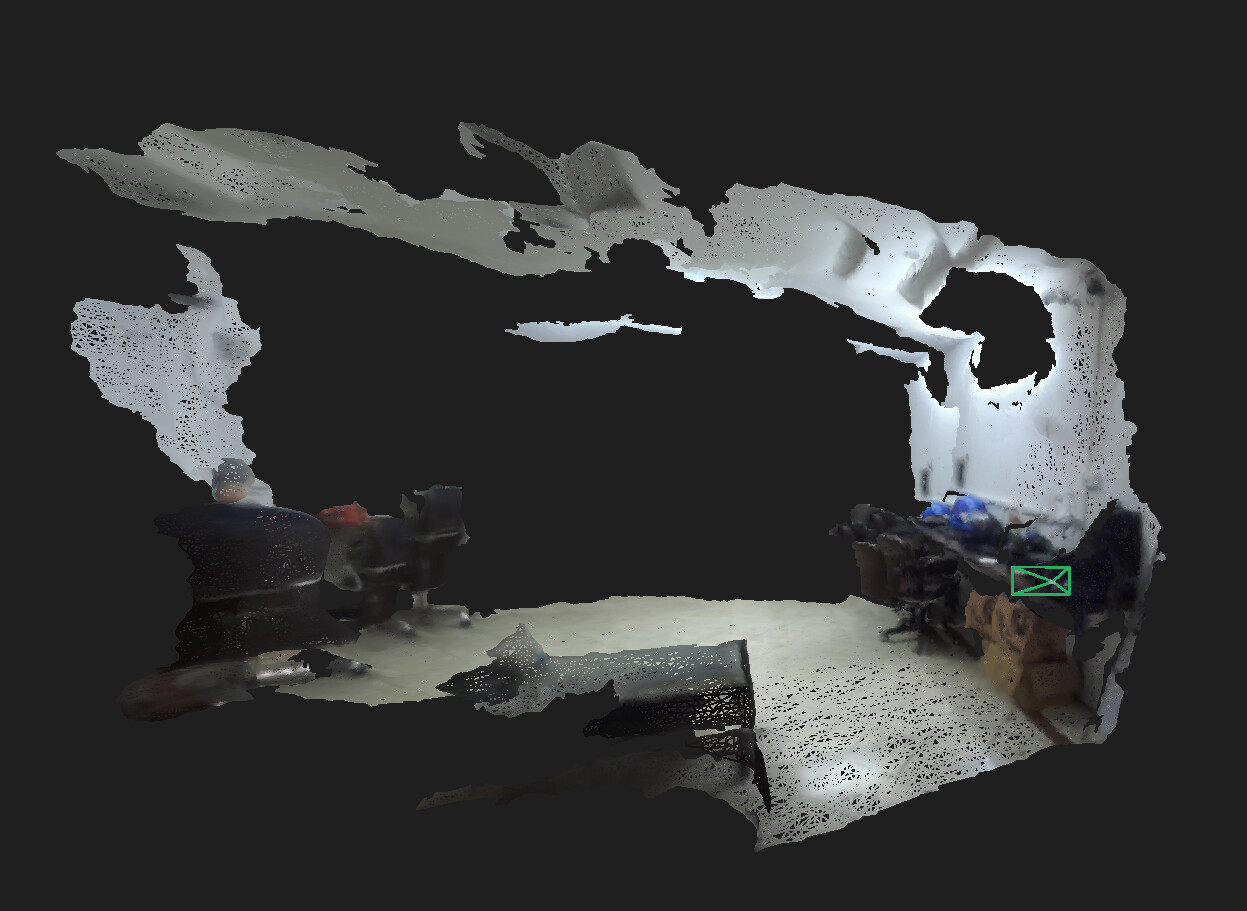
I am using the spatial mapping to get the 3D point cloud data from the ZED2i camera, but the point cloud I am getting isn’t as good as I shown in the above image (I need 3D Map like this map).
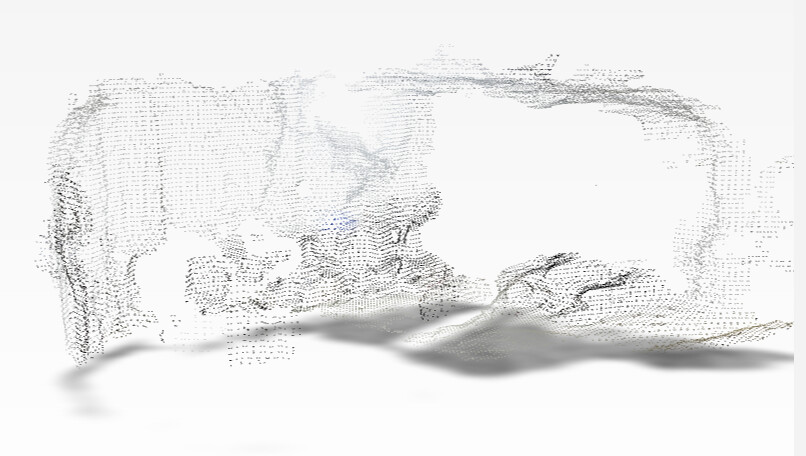
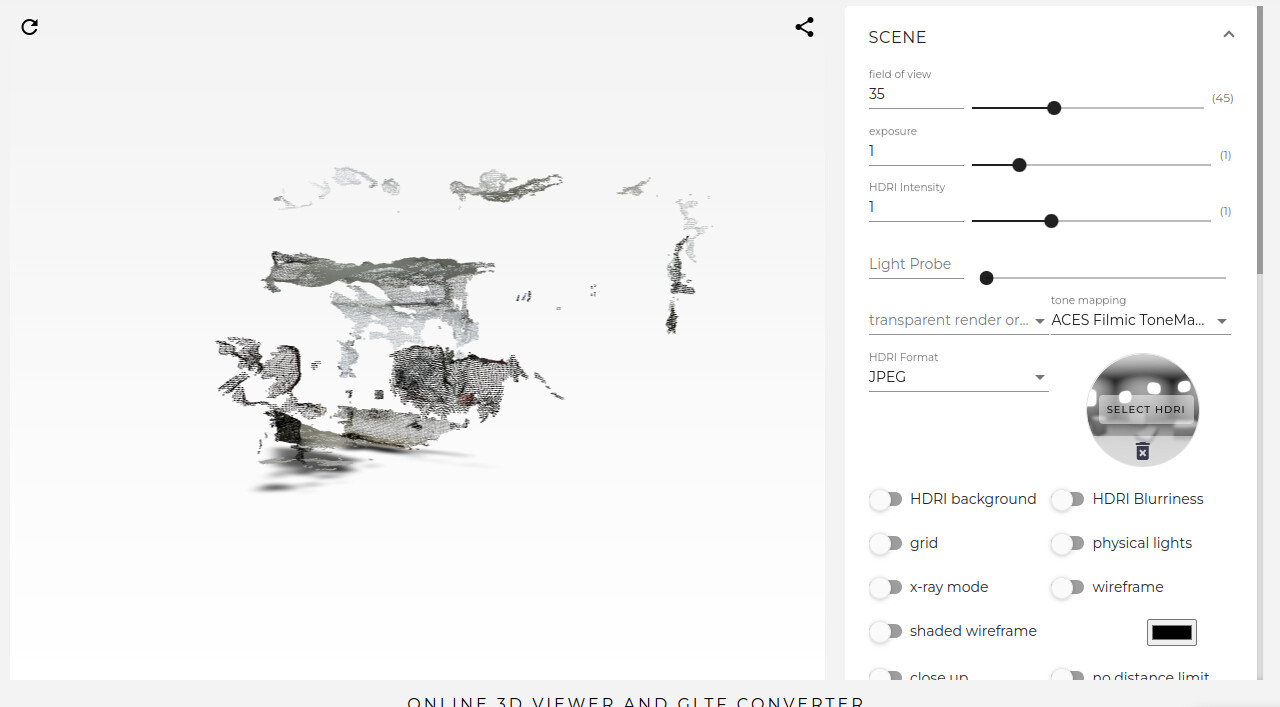
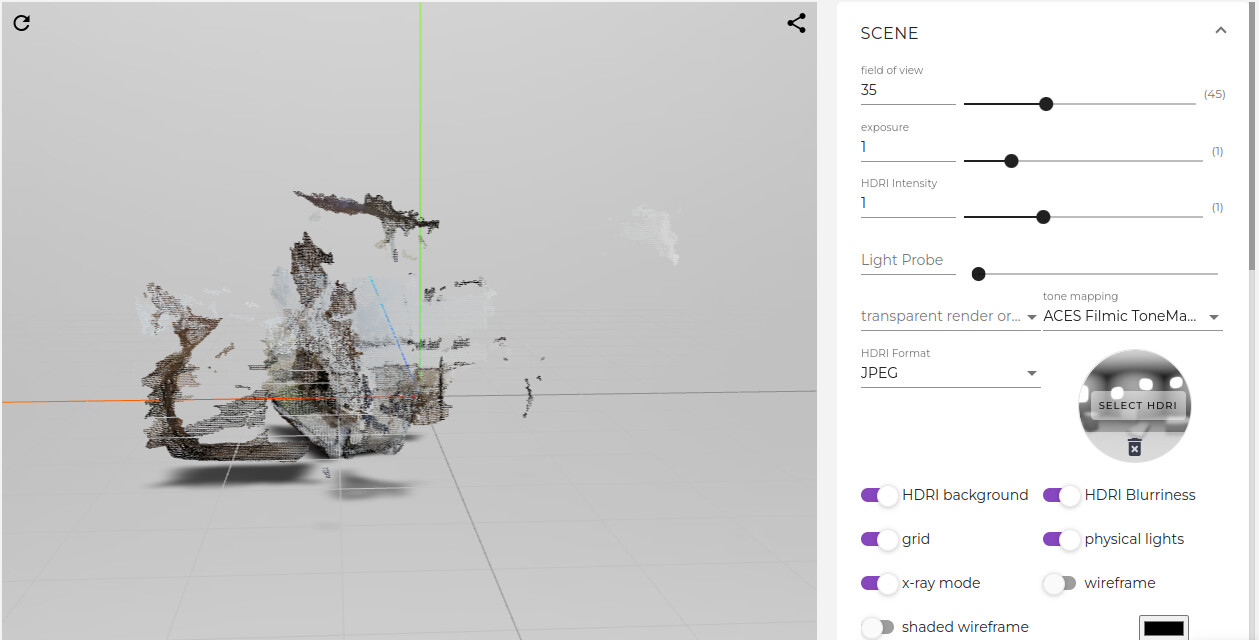
Upon running the ZED SDK spatial mapping python sample, I am getting the mesh file (mesh.obj), but upon viewing the output file on online editor the view isn’t as good as it should be.
I tried the mapping with diffent options but the result is kind of same.
1- RESOLUTION
2- MAPPING_RESOLUTION
For how long did you scan ?
The spatial mapping relies on the positional tracking of the cameras, thus it can drift. The longer you scan, the more drift you’ll have.
I am scanning the room by keeping the camera steady (in my hand) and moving it with my hand to look other way.
And I just scanned it for a minute or two.
I am scanning the room by keeping the camera steady (in my hand) and moving it with my hand to look other way.
And I just scanned it for a minute or two.
I have the files, but how can I send you the files?
I am getting the below message while uploading the files: “Sorry, new users can not upload attachments.”
I uploaded the file on my google drive. I will appreciate if you can please get the files from there.
Here is the link to folder: StereoLabs - Google Drive