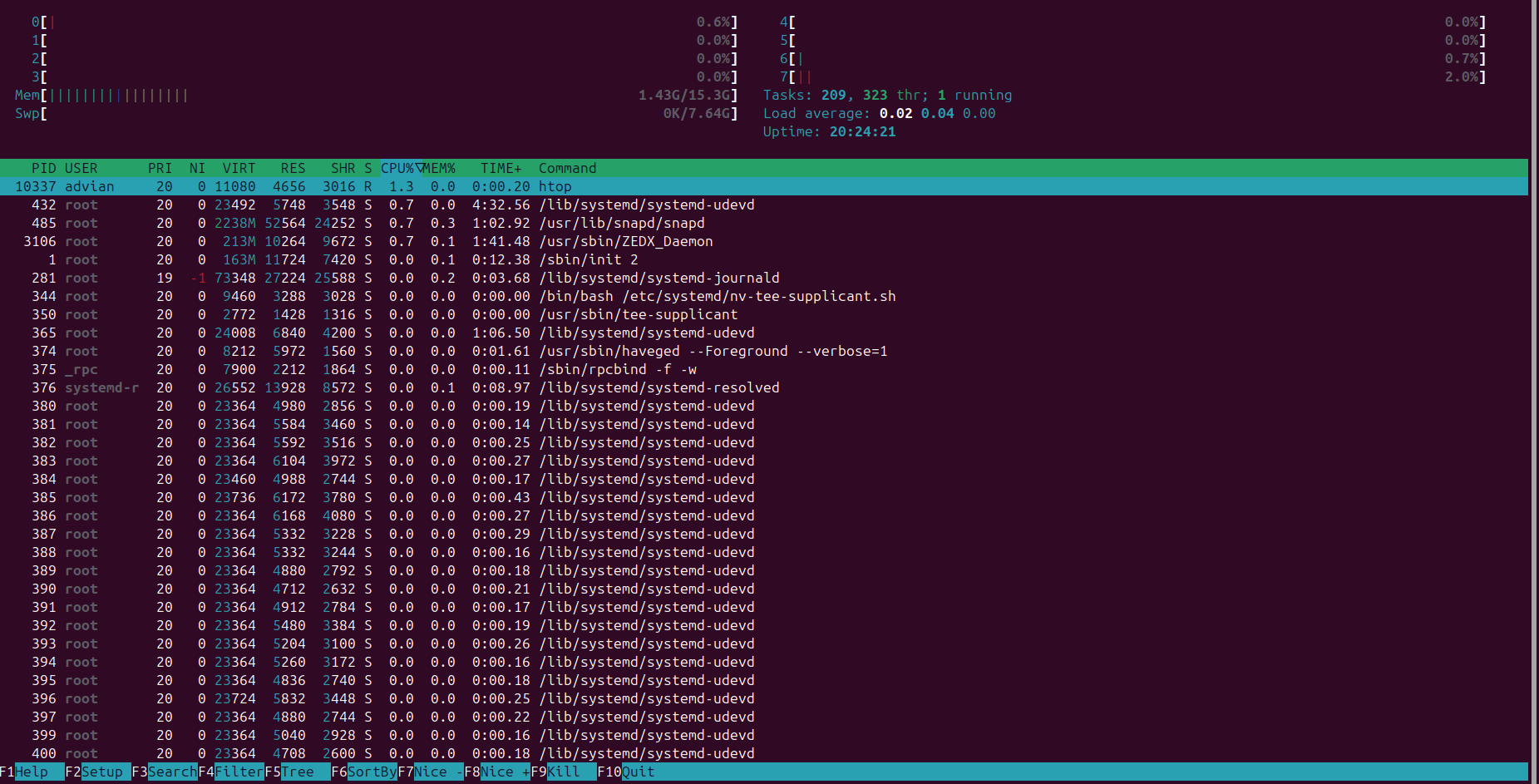
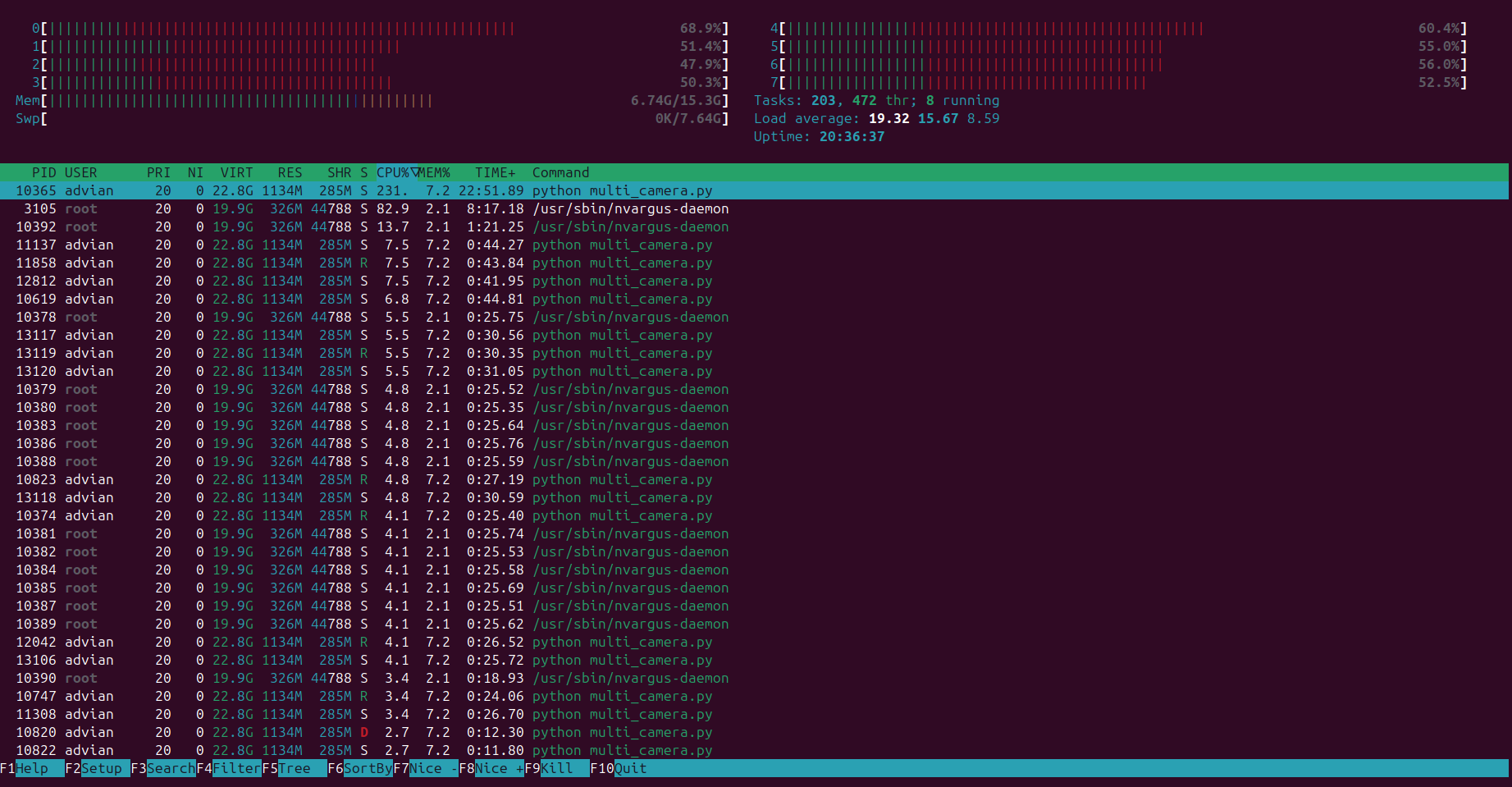
I am facing stability issues with running 4x ZED X Stereo cameras at 1080p@30fps on a ZEDBox using GSML2 port, for a long time. The system crashes eventually due to increasing load average. I am running the multi_camera.py script. I have added output of htop before running the script, and after letting it run for ~12 minutes. You can see that the load averages are increasingly high. I suspect it is because of increase in Uninterruptible Sleep processes.
The load average keeps on increasing until the Jetson becomes unresponsive and needs to be manually powered off and on. To prevent this, I added a watchdog timer so that the device restarts before it becomes unresponsive at high load averages.
Hardware:
-
1x ZED BOX Orin NX 16GB, 1 TB, No GPS
-
4x ZED X Stereo Camera No polarizer, 2.2mm focal length
-
4x GMSL2 Fakra Extension Cable M-F, 10 meter
Software:
-
Jetson Linux v36.3.0
-
Jetpack 6.0
-
Camera Driver: stereolabs-zedbox-duo_1.3.1-LI-MAX96712-all-ZEDBOX-L4T36.3.0_arm64
-
SDK: 5.0.5