When I used the ZED camera, I used the depth camera and the color image for the combination of positioning errors. The distance of about 1m has an error of 2-4 cm. What causes this?
My operation is as follows:
Open the image node in ZED_ROS_Wrapper.
First, we obtained the color image information after the left eye correction, and then marked the (u, v) coordinates in the image.
The depth information is then obtained using /zed/zed_node/depth/depth_registered"
According to (u, v) and the depth information obtained, the corresponding three-digit distance information is calculated: the formula is as follows;
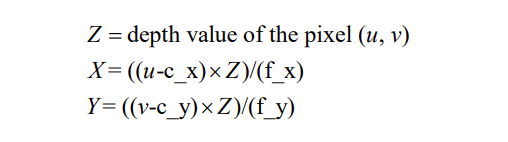
But the error calculated by the problem city is very large, about 0.7m-1.5m within the range of 3-4 cm error, may I ask why the city? Thank you!