Hi @Myzhar
I am using SDK version of 5.0 with l4t35.4 in docker and I will definitely try your suggestion following the guide you provided but still wondering about the benefit of network tuning since I think that my issue is about the computational source usage.
Also you said “What you described is correct“ but in another post, you are saying “18 FPS when using ULTRA depth mode with Xavier NX is expected“. So, what do I need to understand? Is the situation that I faced expected or am I doing something wrong?
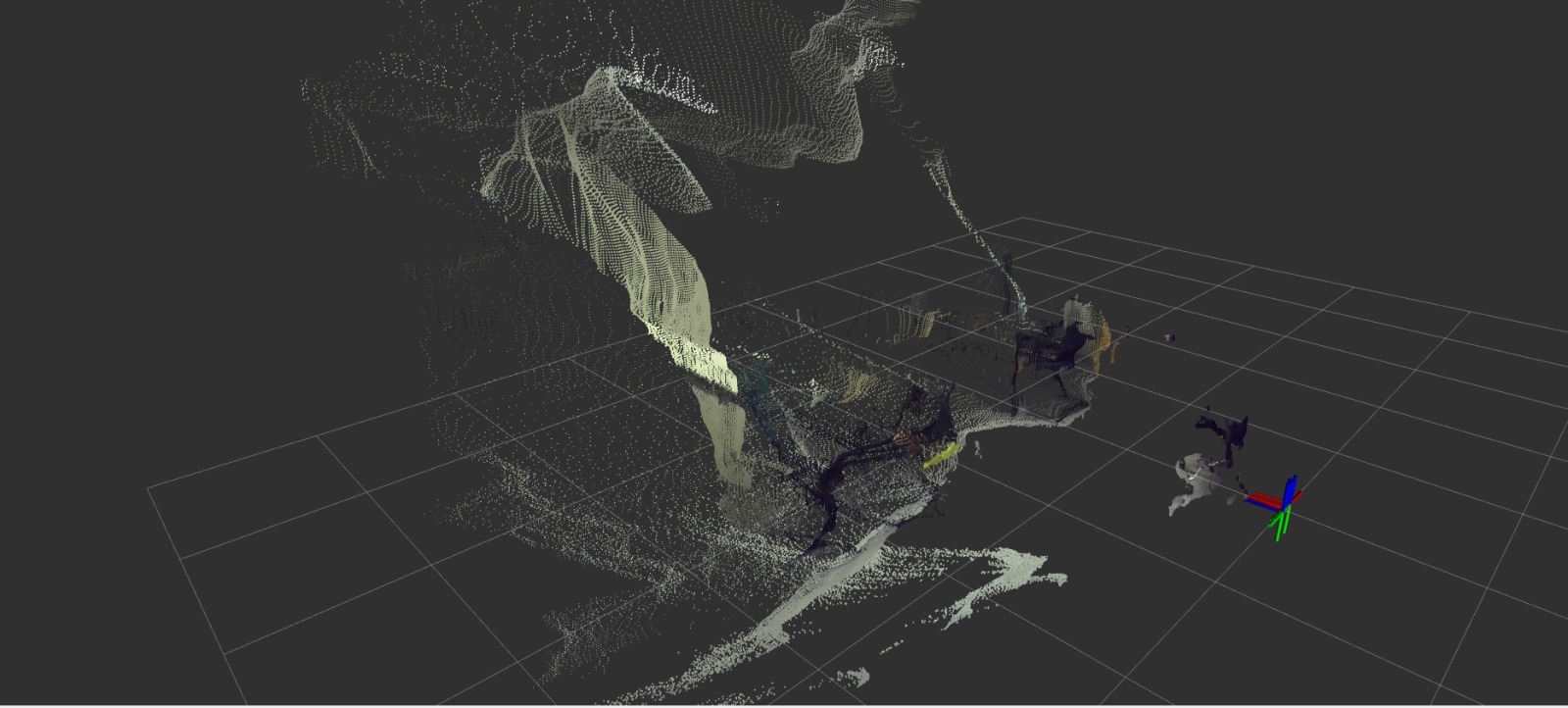
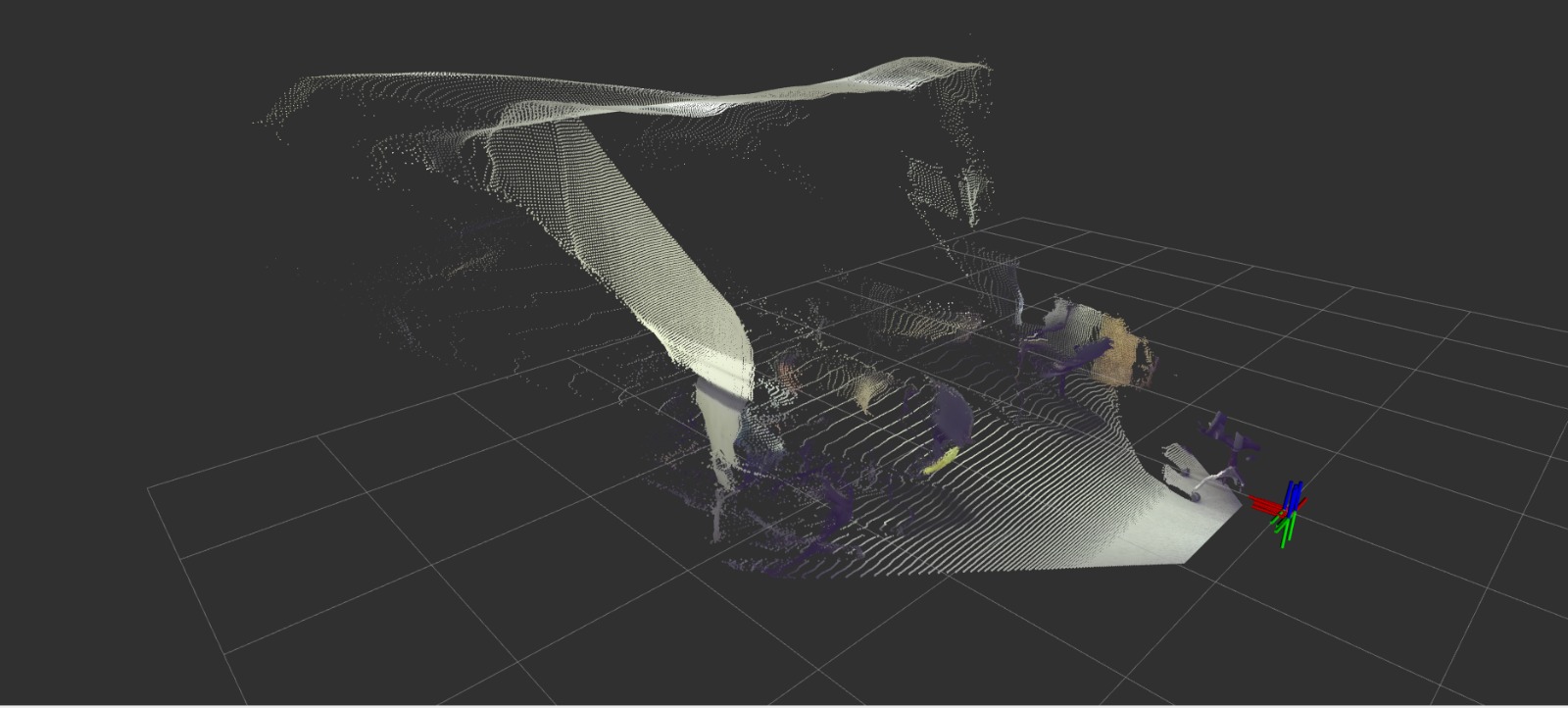
I tried desreasing both the grab_frame_rate in zed2.yaml and the pub_frame_rate in common_stereo.yaml to 5Hz. I am also using PERFORMANCE mode for the time being and it seems like now Jetson is not giving OC_ALARM warning that frequently but the depth information in the pointcloud is very wrong and changes rapidly (I mean it is both noisy and wrong especially for ground floor it goes like the floor is underground, idk why). I tried the same configuration on my PC, which has better hardware, but the result is the same. The pointcloud is wrong for PERFORMANCE and QUALITY options, it is better for ULTRA option but still noisy and it is perfect for NEURAL and NEURAL_PLUS options but it gets slower. This showed that the wrong depth/pointcloud calculation is not about using Jetson but is about something else that I did not figure out yet. I am providing images that shows that issue (PERFORMANCE and NEURAL modes).
Thanks for your consideration,
Selim