I’m using spatial mapping from the ZED_Rig_mono Unity plugin with my robot, and am also incorporating centimeter GPS. Wonderfully, I have just noticed that you have added Geo-tracking to the SDK and ROS2 wrapper. Will you also be releasing new ZED_Rigs for Unity with the Geo-tracking feature? If not, will you please give me some guidance to get me started on adding GPS to area memory generation and spatial mapping in Unity? I’m hoping there’s a way for the camera to load an area memory file and, with the help of the centimeter GPS, localize itself quite quickly, and am also hoping the GPS data can help with mapping.
Any guidance would be greatly appreciated.
Thank you for your time and the excellent product!
We had not planned to add Geo-tracking features in Unity currently (as the demand was not really there, until you!). There are things to do on our side to make this possible, I’ll log it and it’ll be discussed shortly.
Do not hesitate to ping me in a few days, I might forget to keep this topic updated, but I’ll definitely be back to you then.
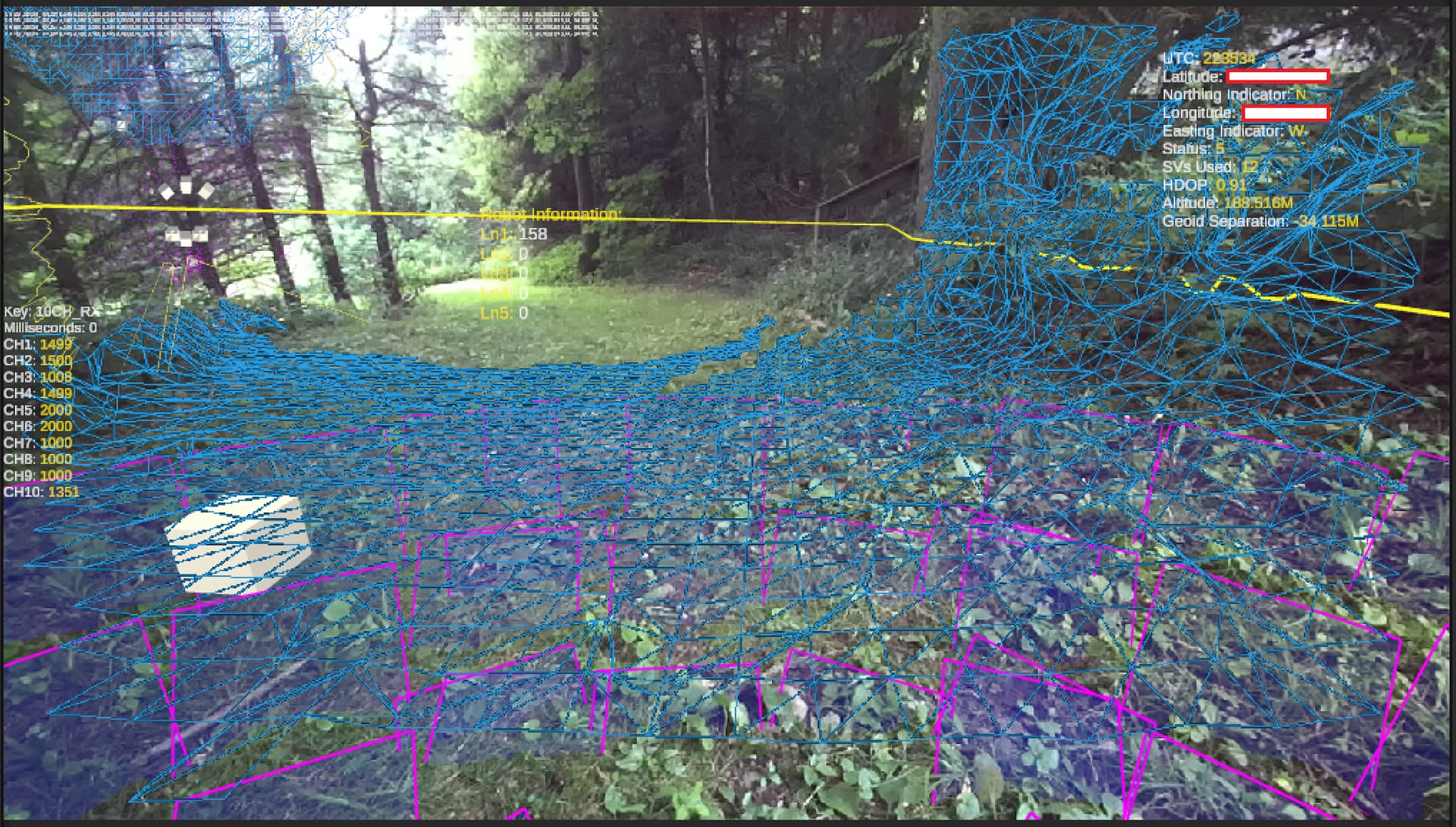
@RobotMachines these views are fantastic! Always good to see projects building on the plugin
That being said, unfortunately, the integration of GeoTracking to Unity is not planned in the short term. I don’t have a date to give at all, but the request will be re-evaluated regularly is as much as I can say.
I thought it worth a try to ask Anything to help with localization will advance the use of the cameras more quickly. I’ll work on matching the GPS data with with area memory files. This way the robot can position itself using the depth camera, other sensors, GPS, and IMU, load an area files, look around a bit (to move the camera), and the camera should lock to position. I don’t know how well that will work out in a field with no objects around. In that case though, the robot can just use the depth vision, other sensors, GPS, IMU, to get in to position. I know ROS2 is popular, but Unity seems like a really good environment for robotics. I’m really enjoying it.