Hi Team,
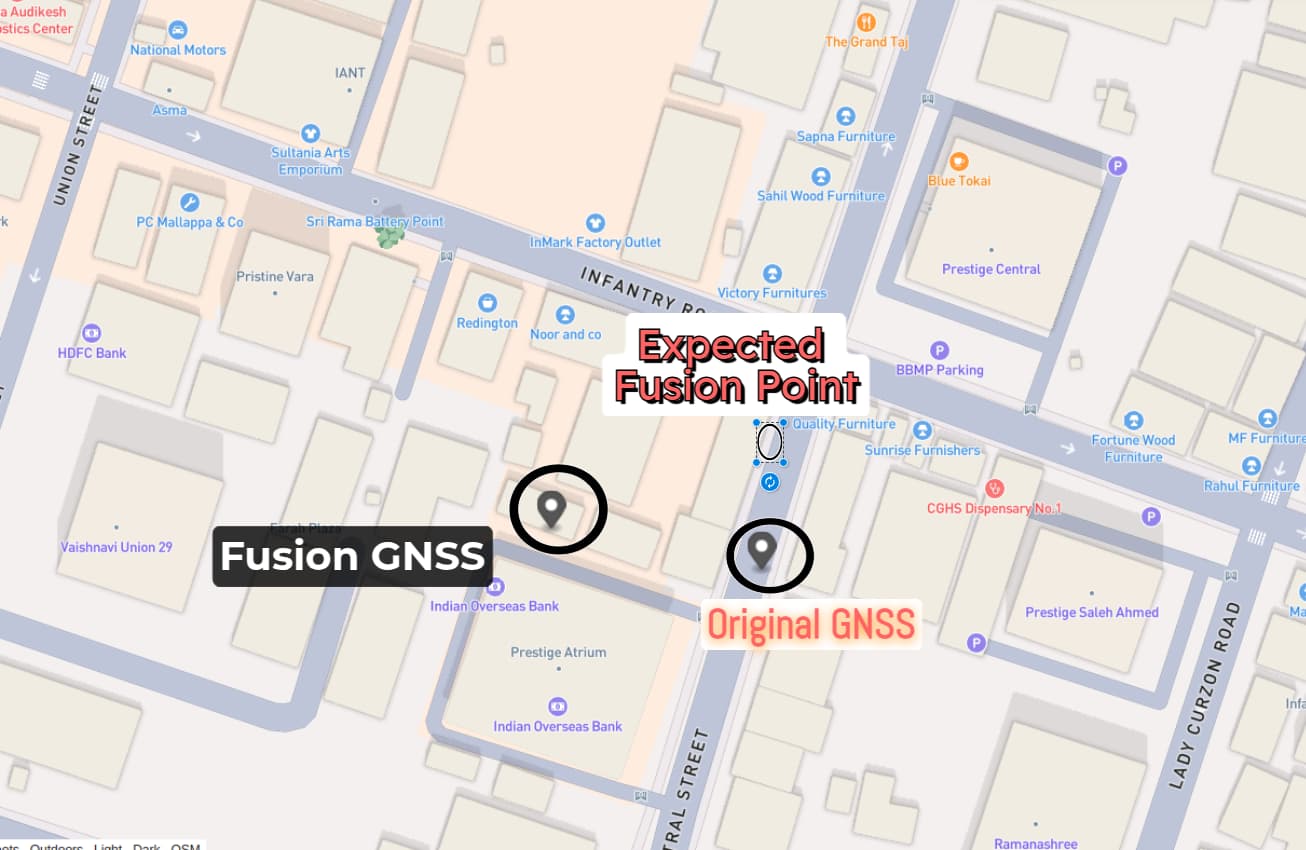
I am currently working on detecting the location of an object using the camera_to_geo method, but the GPS coordinates after fusion do not seem to match the actual location.
For context, I have mounted a ZED2i Camera and a ZED Box with GNSS on a car. Below is the code I am using to calculate the GPS point. Could you kindly help me identify if I’m missing anything or if there’s a specific step I should take to ensure the correct GPS output?
Code:
python
Copy
#!/usr/bin/env python3
import numpy as np
import argparse
import torch
import cv2
import pyzed.sl as sl
from ultralytics import YOLO
from ultralytics.engine.results import Results
from threading import Lock, Thread
from time import sleep
from typing import List
import exporter.KMLExporter as export
from display.generic_display import GenericDisplay
from exporter.gnss_saver import get_current_datetime, GNSSSaver
from gps_reader.gnss_replay import GNSSReplay
from gps_reader.gpsd_reader import GPSDReader
from required_config import constant_file
# Globals
lock = Lock()
run_signal = False
exit_signal = False
image_net: np.ndarray = None
detections: List[sl.CustomMaskObjectData] = None
sl_mats: List[sl.Mat] = None # We need it to keep the ownership of the sl.Mat
def xywh2abcd_(xywh: np.ndarray) -> np.ndarray:
output = np.zeros((4, 2))
# Center / Width / Height -> BBox corners coordinates
x_min = (xywh[0] - 0.5 * xywh[2])
x_max = (xywh[0] + 0.5 * xywh[2])
y_min = (xywh[1] - 0.5 * xywh[3])
y_max = (xywh[1] + 0.5 * xywh[3])
# A ------ B
# | Object |
# D ------ C
output[0][0] = x_min
output[0][1] = y_min
output[1][0] = x_max
output[1][1] = y_min
output[2][0] = x_max
output[2][1] = y_max
output[3][0] = x_min
output[3][1] = y_max
return output
def detections_to_custom_masks_(dets: Results) -> List[sl.CustomMaskObjectData]:
global sl_mats
output = []
sl_mats = []
for det in dets.cpu().numpy():
# Creating ingestable objects for the ZED SDK
obj = sl.CustomMaskObjectData()
# Bounding box
box = det.boxes
xywh = box.xywh[0]
abcd = xywh2abcd_(xywh)
obj.bounding_box_2d = abcd
obj.label = box.cls.item()
obj.probability = box.conf.item()
obj.is_grounded = False
# Mask
if det.masks is not None:
mask_bin = (det.masks.data[0] * 255).astype(np.uint8)
mask_bin = mask_bin[int(abcd[0][1]): int(abcd[2][1]),
int(abcd[0][0]): int(abcd[2][0])]
if not mask_bin.flags.c_contiguous:
mask_bin = np.ascontiguousarray(mask_bin)
# Mask as a sl mat
sl_mat = sl.Mat(width=mask_bin.shape[1],
height=mask_bin.shape[0],
mat_type=sl.MAT_TYPE.U8_C1,
memory_type=sl.MEM.CPU)
p_sl_as_cv = sl_mat.get_data()
np.copyto(p_sl_as_cv, mask_bin)
sl_mats.append(sl_mat)
obj.box_mask = sl_mat
else:
print("[Warning] No mask found in the prediction. Did you use a seg model?")
output.append(obj)
return output
def start_record(video_path, save_req, create_assets, create_notification):
input_type = sl.InputType()
if video_path is not None:
input_type.set_from_svo_file(video_path)
init_params = sl.InitParameters(input_t=input_type, svo_real_time_mode=False)
init_params.coordinate_units = sl.UNIT.METER
init_params.depth_mode = sl.DEPTH_MODE.ULTRA # QUALITY
init_params.coordinate_system = sl.COORDINATE_SYSTEM.RIGHT_HANDED_Y_UP
init_params.depth_maximum_distance = 50
# Initialize the camera
print("Initializing Camera...")
zed = sl.Camera()
status = zed.open(init_params)
if status != sl.ERROR_CODE.SUCCESS:
print(repr(status))
exit()
print("Camera Initialized")
#Enable SVO recording :
if video_path is None:
svo_path = "ZED_SN" + str(zed.get_camera_information().serial_number) + "_" + get_current_datetime() + ".svo"
returned_state = zed.enable_recording(sl.RecordingParameters(svo_path, sl.SVO_COMPRESSION_MODE.H264_LOSSLESS))
if returned_state != sl.ERROR_CODE.SUCCESS:
print("Recording ZED : " + repr(status) + ". Exit program.")
zed.close()
exit()
# Create Fusion object:
fusion = sl.Fusion()
init_fusion_param = sl.InitFusionParameters()
init_fusion_param.coordinate_units = sl.UNIT.METER
fusion_init_code = fusion.init(init_fusion_param)
if fusion_init_code != sl.FUSION_ERROR_CODE.SUCCESS:
print("[ZED][ERROR] Failed to initialize fusion :" + repr(fusion_init_code) + ". Exit program")
exit()
# Enable Positional Tracking
positional_tracking_parameters = sl.PositionalTrackingParameters()
# If the camera is static, uncomment the following line to have better performances and boxes sticked to the ground.
# positional_tracking_parameters.set_as_static = True
zed.enable_positional_tracking(positional_tracking_parameters)
# Enable Object Detection
obj_param = sl.ObjectDetectionParameters()
obj_param.detection_model = sl.OBJECT_DETECTION_MODEL.CUSTOM_BOX_OBJECTS
obj_param.enable_tracking = True
obj_param.enable_segmentation = True
zed.enable_object_detection(obj_param)
# Display
camera_infos = zed.get_camera_information()
camera_res = camera_infos.camera_configuration.resolution
# Create Fusion object:
fusion = sl.Fusion()
init_fusion_param = sl.InitFusionParameters()
init_fusion_param.coordinate_units = sl.UNIT.METER
fusion_init_code = fusion.init(init_fusion_param)
if fusion_init_code != sl.FUSION_ERROR_CODE.SUCCESS:
print("[ZED][ERROR] Failed to initialize fusion :" + repr(fusion_init_code) + ". Exit program")
exit()
# Enable odometry publishing:
configuration = sl.CommunicationParameters()
zed.start_publishing(configuration)
# Enable GNSS data producing:
if video_path is None:
gnss_reader = GPSDReader()
else:
gnss_reader = GNSSReplay(None,zed)
status_initialize = gnss_reader.initialize()
if status_initialize == -1:
gnss_reader.stop_thread()
zed.close()
exit()
# Subscribe to odometry:
uuid = sl.CameraIdentifier(zed.get_camera_information().serial_number)
fusion.subscribe(uuid, configuration, sl.Transform(0, 0, 0))
# Enable positional tracking for Fusion object:
positional_tracking_fusion_parameters = sl.PositionalTrackingFusionParameters()
positional_tracking_fusion_parameters.enable_GNSS_fusion = True
gnss_calibration_parameters = sl.GNSSCalibrationParameters()
gnss_calibration_parameters.target_yaw_uncertainty = 0.1
gnss_calibration_parameters.enable_translation_uncertainty_target = False
gnss_calibration_parameters.enable_reinitialization = True
gnss_calibration_parameters.gnss_vio_reinit_threshold = 5
positional_tracking_fusion_parameters.gnss_calibration_parameters = gnss_calibration_parameters
fusion.enable_positionnal_tracking(positional_tracking_fusion_parameters)
# Prepare runtime retrieval
runtime_params = sl.RuntimeParameters()
obj_runtime_param = sl.ObjectDetectionRuntimeParameters()
image_left_tmp = sl.Mat()
objects = sl.Objects()
model = YOLO('/home/user/Documents/models/Version8Small.pt')
zed_pose = sl.Pose()
gnss_data_saver = GNSSSaver(zed)
viewer = GenericDisplay()
viewer.init(zed.get_camera_information().camera_model)
resolution = zed.get_camera_information().camera_configuration.resolution
class_names = model.names
while True:
plot_frame = None
if zed.grab(runtime_params) == sl.ERROR_CODE.SUCCESS:
zed.get_position(zed_pose, sl.REFERENCE_FRAME.WORLD)
# -- Get the image
zed.retrieve_image(image_left_tmp, sl.VIEW.LEFT)
image_net = image_left_tmp.get_data()
img = cv2.cvtColor(image_net, cv2.COLOR_BGRA2RGB)
img = cv2.cvtColor(img, cv2.COLOR_RGB2BGRA)
det = model.track(img, save=False, retina_masks=True,device='cuda',persist=True, show=True, verbose=False)[0]
plot_frame = det.plot()
# ZED CustomMasks format
detections = detections_to_custom_masks_(det)
# -- Ingest detections
zed.ingest_custom_mask_objects(detections)
zed.retrieve_objects(objects, obj_runtime_param)
else:
break
# Get GNSS data:
if video_path is None:
status, input_gnss = gnss_reader.grab()
else:
status, input_gnss = gnss_reader.grab(zed_pose.timestamp.get_nanoseconds())
if status.value == sl.ERROR_CODE.SUCCESS.value:
# Display it on the Live Server
viewer.updateRawGeoPoseData(input_gnss)
# Publish GNSS data to Fusion
ingest_error = fusion.ingest_gnss_data(input_gnss)
if ingest_error == sl.FUSION_ERROR_CODE.SUCCESS:
print("Ingest error occurred when ingesting GNSSData: ", ingest_error)
latitude, longitude, altitude = input_gnss.get_coordinates(False)
coordinates = {
"latitude": latitude,
"longitude": longitude,
"altitude": altitude,
}
export.saveKMLData("raw_gnss.kml", coordinates)
# Save GNSS data into JSON:
gnss_data_saver.addGNSSData(input_gnss)
else:
print("Ingest error occurred when ingesting GNSSData: ", ingest_error)
# Process data and compute positions:
if fusion.process() == sl.FUSION_ERROR_CODE.SUCCESS:
if save_req and plot_frame is not None:
for obj in objects.object_list:
obj_translation = sl.Translation()
obj_translation.init_vector(obj.position[0], obj.position[1], obj.position[2])
obj_transform = sl.Transform()
obj_transform.set_translation(obj_translation)
obj_pose = sl.Pose()
obj_pose.init_transform(obj_transform)
object_geo_pose = sl.GeoPose()
fusion.camera_to_geo(obj_pose, object_geo_pose)
class_id = obj.raw_label # Class ID
class_name = class_names.get(int(obj.raw_label))
if class_id == 29:
print(object_geo_pose.latlng_coordinates.get_coordinates(False),input_gnss.get_coordinates(False))
cv2.imshow('Frame',plot_frame)
cv2.waitKey(0)
zed.close()
Any insights or suggestions would be greatly appreciated!
Thank you in advance!