Hello,
I’ve tested the sample “body tracking → multi-camera → cpp” with two Zed2 connected via usb.
I have seen that when a joint is not seen by both cameras the fused body is wrong, even if the raw skeleton of the camera that is seeing the body is right.
Here’s some example of what I mean.
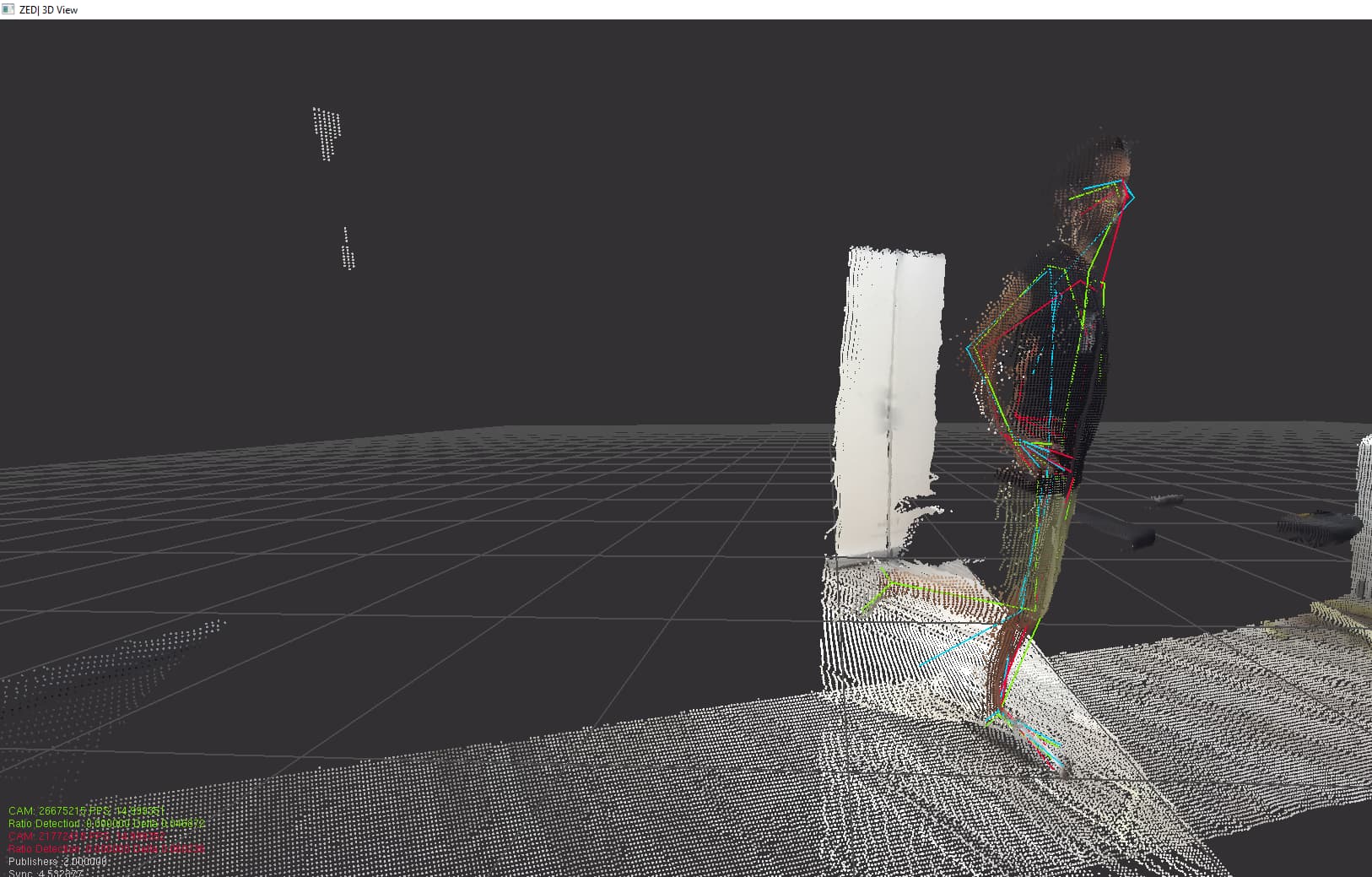
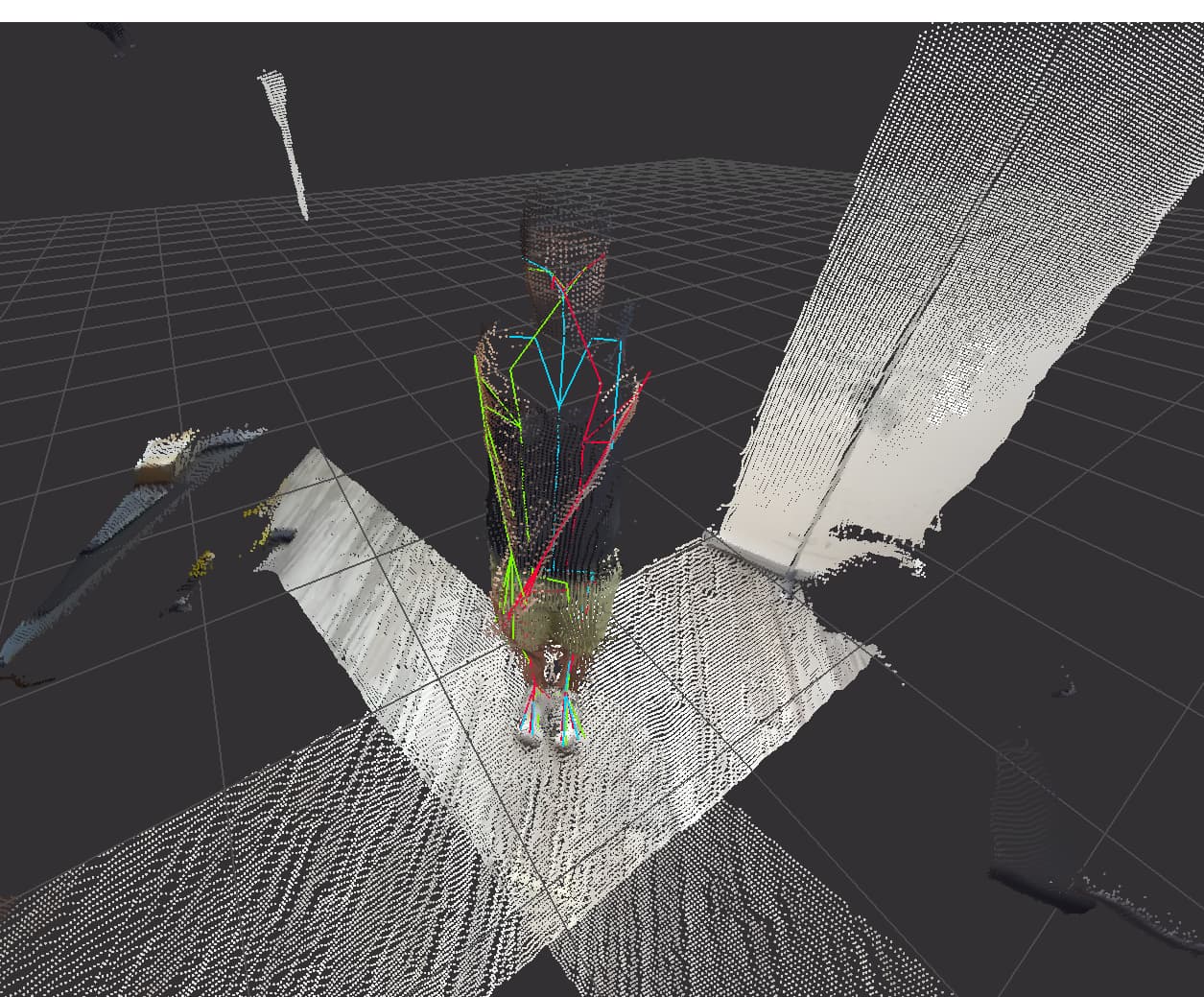
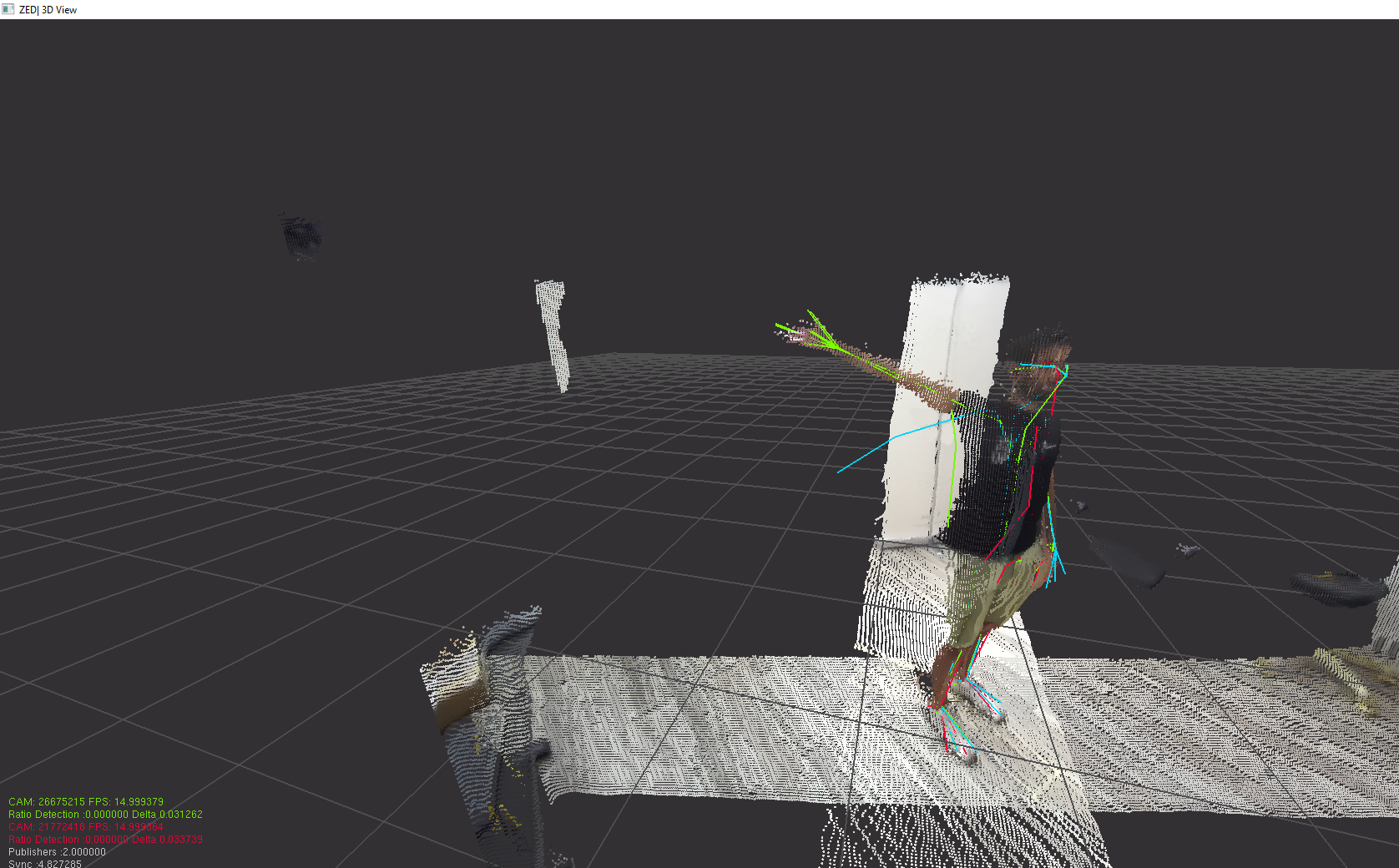
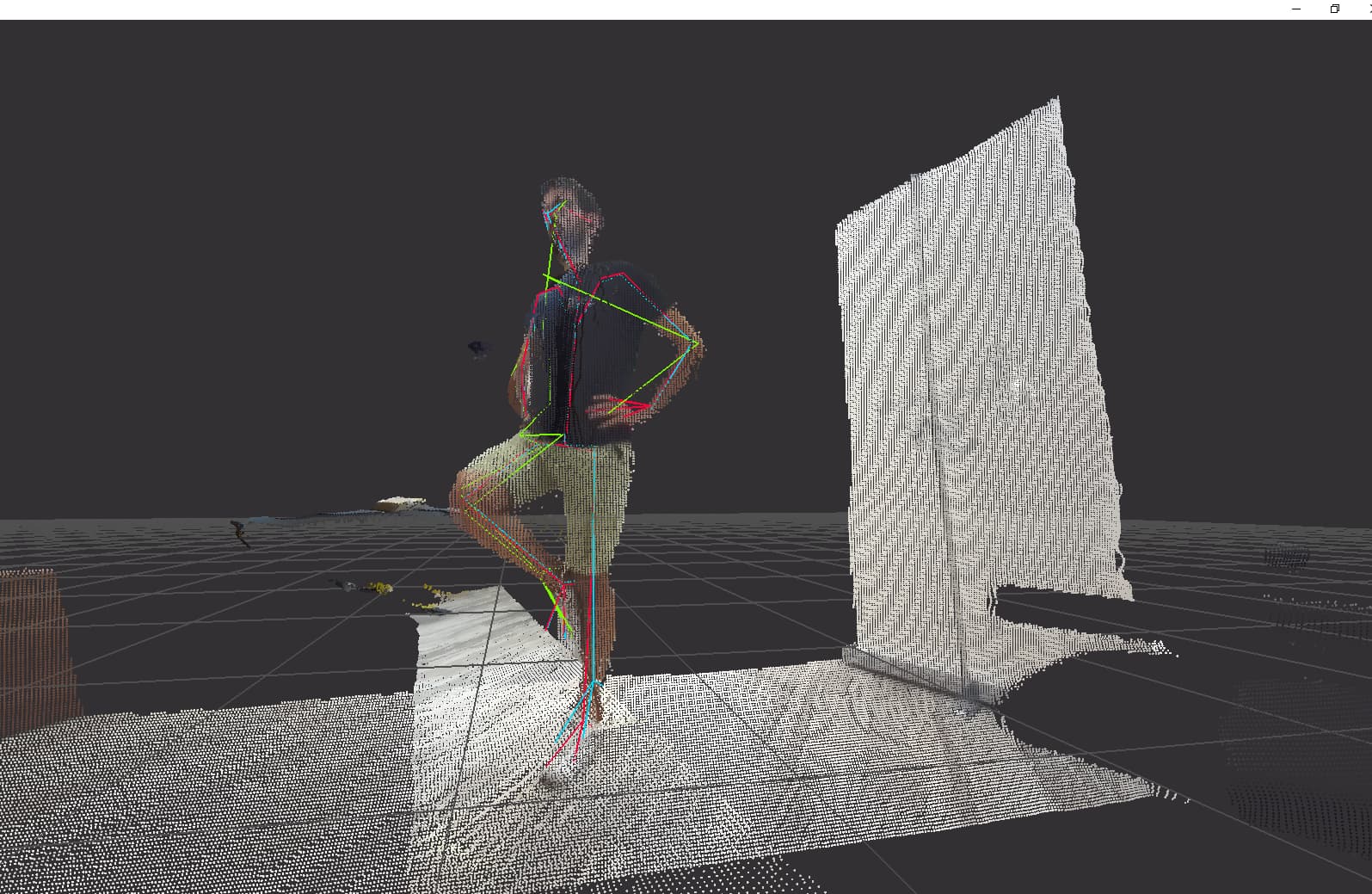
Green and Red skeletons are the raw skeletons detected from each camera and the Blue one is the fused skeleton.
You can see that the blue skeleton seems an average of the two raw bodies even if one of them is not showed because of its low confidence.
Can I set some parameter to get the joints of the fused body only from the showed raw skeleton joints (with high confidence) insted of considering every joint even if it has low confidence?
I tried to set different values of parameters from BodyTrackingFusionRuntimeParameters without success.