hello,after i fuse two cameras with calibration.json that zed360 create,my body detections data values in Y-axis have become very strange.
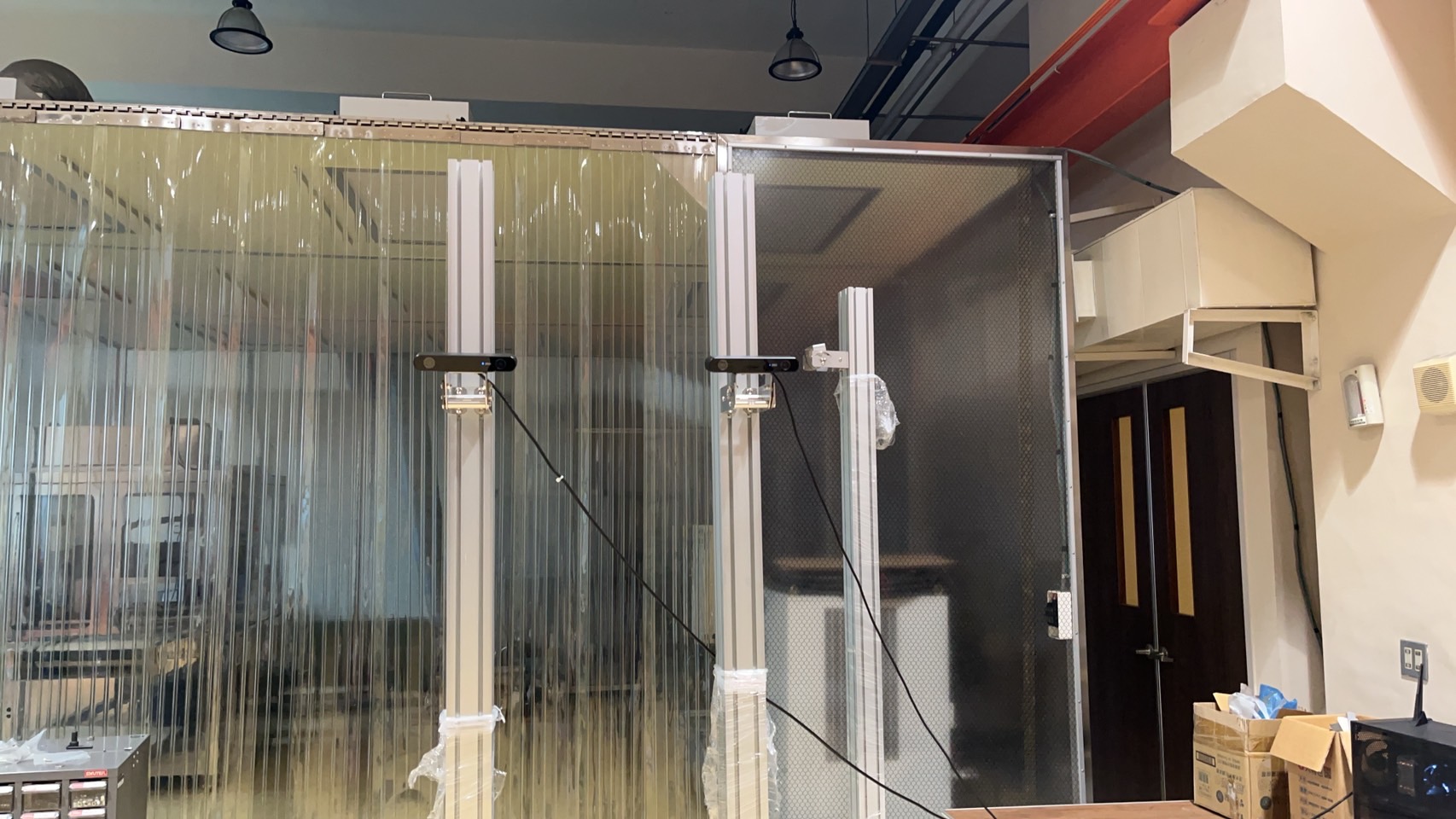
My movement is to walk straight and away from the camera,and camera is mounted 200 cm above the ground,and the people height is 170 cm.
i need some help.
thank you.
my calibration.json is{
“37082802”: {
“input”: {
“fusion”: {
“type”: “INTRA_PROCESS”
},
“zed”: {
“configuration”: “37082802”,
“type”: “USB_SERIAL”
}
},
“world”: {
“rotation”: [
0.0,
0.0,
0.0
],
“translation”: [
0.0,
0.047705620527267456,
0.0
]
}
},
“38076367”: {
“input”: {
“fusion”: {
“type”: “INTRA_PROCESS”
},
“zed”: {
“configuration”: “38076367”,
“type”: “USB_SERIAL”
}
},
“world”: {
“rotation”: [
0.4813530147075653,
-0.06160470098257065,
-0.05716954916715622
],
“translation”: [
-0.447013795375824,
0.06858836114406586,
-0.084076888859272
]
}
}
}
the Y-axis values:0.322, 0.317, 0.29, 0.305, 0.315, 0.299, 0.303, 0.287, 0.304, 0.294, 0.3, 0.289, 0.303, 0.294, 0.294, 0.277, 0.26, 0.288, 0.298, 0.307, 0.295, 0.308, 0.298, 0.313, 0.306, 0.204, 0.217, 0.307, 0.346, 0.367, 0.35, 0.336, 0.358, 0.35, 0.34, 0.368, 0.365, 0.392, 0.391, 0.424, 0.426, 0.426, 0.474, 0.48, 0.549, 0.567, 0.615, 0.621, 0.658, 0.683, 0.685, 0.725, 0.724, 0.787, 0.8, 0.81, 0.883, 0.897, 0.943, 0.942, 0.98, 1.012, 1.015, 1.081, 1.096, 1.147, 1.156, 1.198, 1.225, 1.222, 1.257, 1.261, 1.311, 1.327, 1.339, 1.411, 1.418, 1.443, 1.448, 1.444, 1.497, 1.494, 1.566, 1.572, 1.617, 1.639, 1.642, 1.663, 1.653, 1.72, 1.752, 1.747, 1.776, 1.754, 1.718, 1.745, 1.716, 1.72, 1.686, 1.693, 1.617, 1.469, 1.56, 1.48, 1.522, 1.522, 1.477, 1.476, 1.439, 1.378, 1.352, 1.3, 1.281, 1.228, 1.242, 1.208, 1.213, 1.183, 1.145, 1.109, 1.066, 1.048, 1.037, 0.991, 0.991, 0.958, 0.871, 0.86, 0.845, 0.802, 0.781, 0.739, 0.736, 0.723, 0.695, 0.67, 0.628, 0.598, 0.573, 0.529, 0.525, 0.495, 0.503, 0.479, 0.424, 0.44, 0.434, 0.391, 0.385, 0.361, 0.335, 0.349, 0.338, 0.35, 0.343, 0.367, 0.269, 0.283, 0.251, 0.397, 0.444, 0.468, 0.48, 0.477, 0.475,
Hi @wade
It’s difficult to tell from the values alone, does it appear correct in ZED 360 and the ZED SDK body tracking fusion sample with its viewer?
- Can you attach a screenshot or video recording of the problem?
- What kind of results do you expect?
- Can you also attach a schema of your installation? (mentioning the rough position and orientation of the cameras, which camera is which in your multicamera file, and the path taken by the subject)
- Which camera (serial number) are you going away from?
sorry, i’m a new user,so i can’t upload any file
I want to obtain the actual Y-axis value from the camera to the key point of the human head
the “37082802” is near the “38076367”,and then the people walk straight and away from the camera “37082802”
Congrats on your rank promotion, you should be able to upload things now, sorry ![]()
Intuitively, the values seem to fit for a subject that goes away and back from the camera, but if it’s not that, it’s indeed weird.
the video is my movement
In the photo, the left camera is “37082802”,and the right camera is “38076367”
My coordinate_system = sl.COORDINATE_SYSTEM.RIGHT_HANDED_Y_UP
so,Y-axis is uppon the ground
Ok, I understand the problem. It could be the coordinate system set incorrectly in InitFusionParameters or in the senders.
- Can you send me a code sample reproducing the issue? That’s the main thing, it will help check which parameters you used.
Also, an SVO recording of your situation, from both cameras would help to reproduce the issue on my side.
You can use our multicamera recording sample or 2 instances of ZED Explorer at the same time.
You can send the SVO here or to support@stereolabs.com mentioning this post. (you will have to host them on your platform of choice)
thank you for your response.
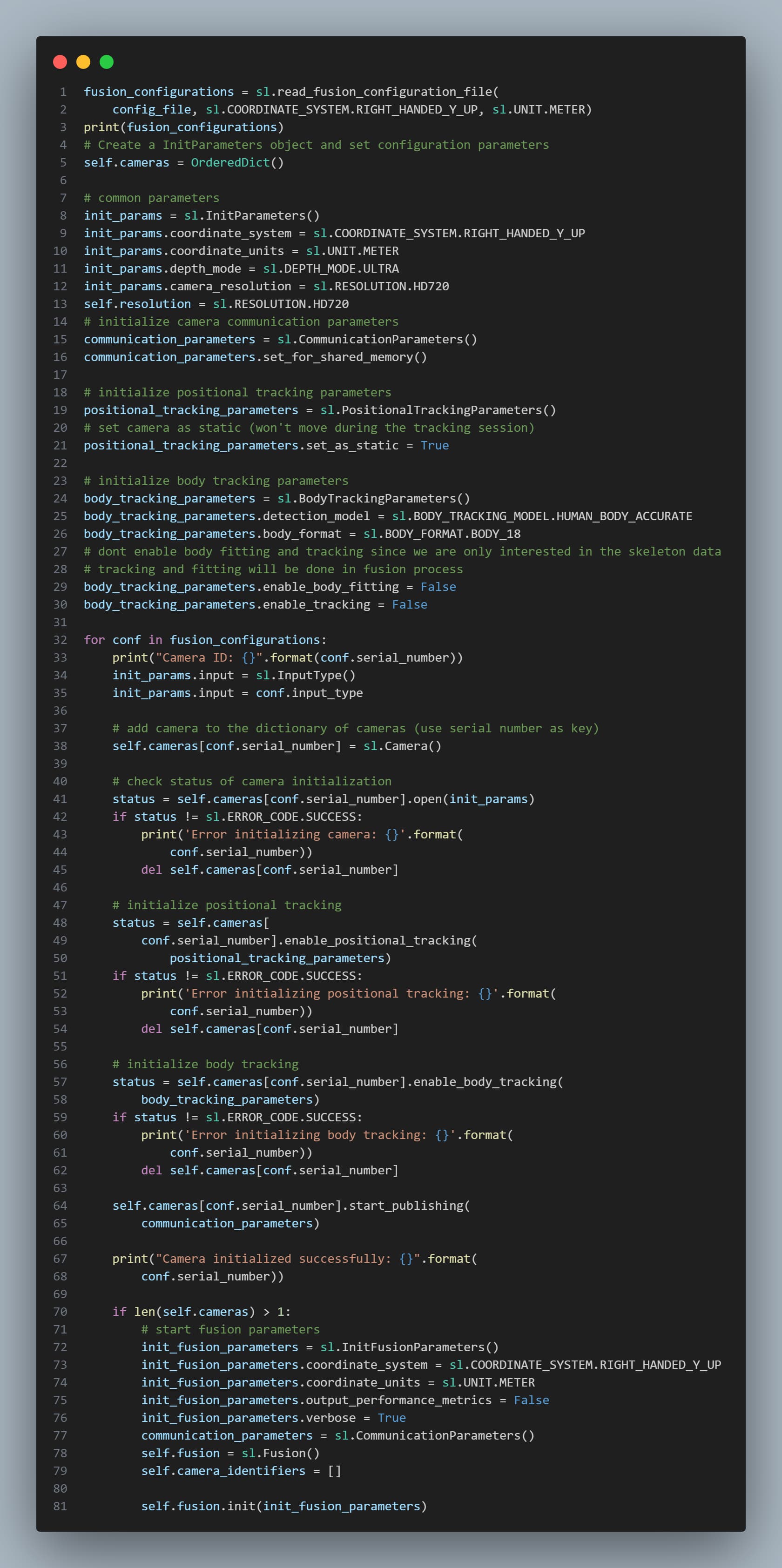
this is my fusion parameters code,and i send my svo file to the support@stereolabs.com
Execuse me,
Do you have a response that can solve my question?