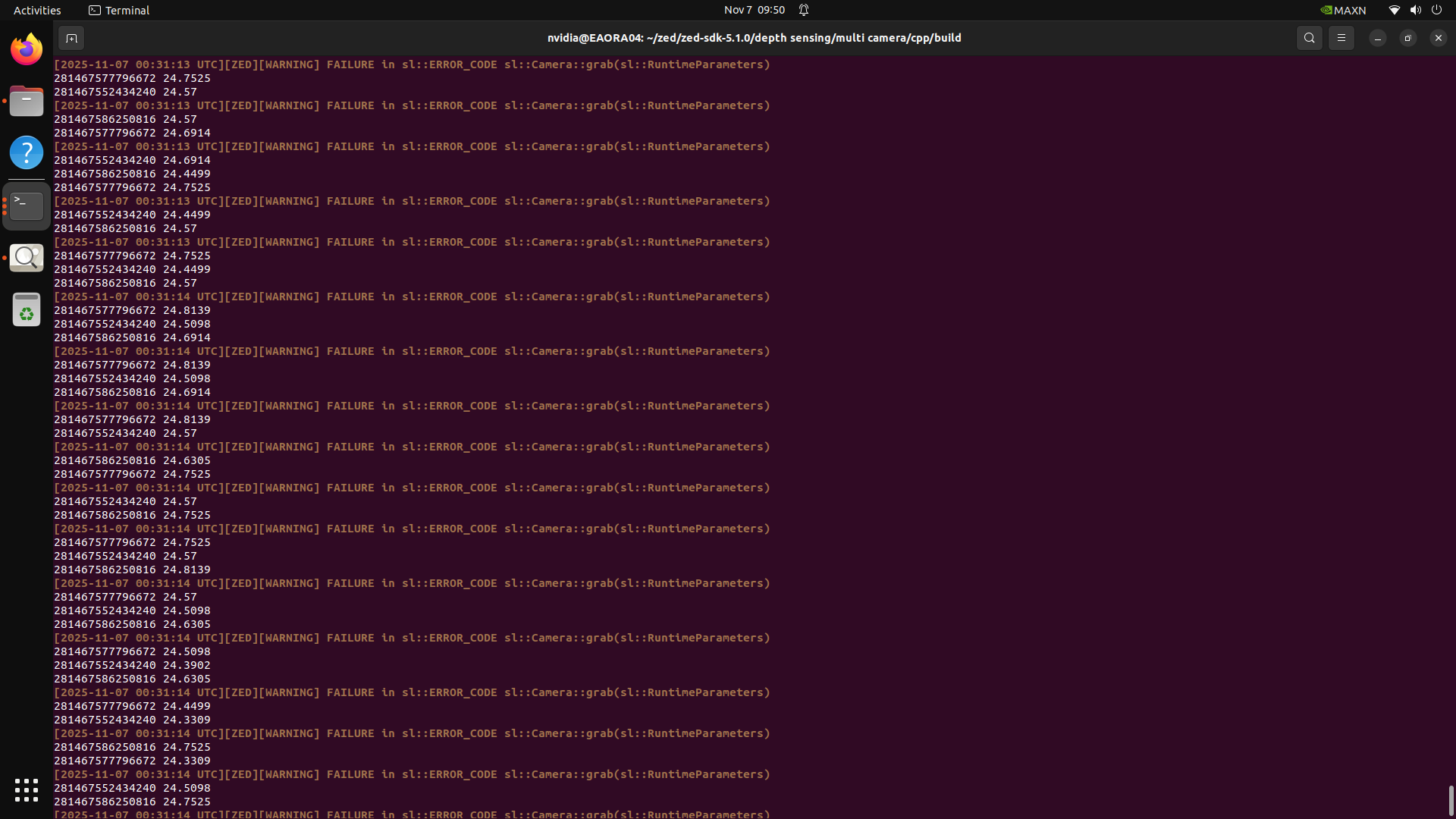
We have upgraded to SDK v5.1; stability has improved, but the aforementioned error message still appears after running for about two hours with the PLUS mode and 60fps mode enabled. The screenshot shows the terminal output, and the error information from the syslog.
Nov 6 17:50:45 EAORA04 systemd[2763]: Starting Tracker metadata extractor...
Nov 6 17:50:45 EAORA04 dbus-daemon[2779]: [session uid=1000 pid=2779] Successfully activated service 'org.freedesktop.Tracker3.Miner.Extract'
Nov 6 17:50:45 EAORA04 systemd[2763]: Started Tracker metadata extractor.
Nov 6 17:50:45 EAORA04 nvargus-daemon[1000]: Wrong frequency range!
Nov 6 17:50:46 EAORA04 kernel: [32999.175530] cpufreq: cpu0,cur:1100000,set:2201600,delta:1101600,set ndiv:172
Nov 6 17:50:46 EAORA04 kernel: [32999.179523] cpufreq: cpu8,cur:1098000,set:2201600,delta:1103600,set ndiv:172
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: message repeated 23 times: [ Wrong frequency range!]
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error Disconnected: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 kernel: [33006.145818] nvgpu: 17000000.gpu nvgpu_tsg_unbind_channel:726 [ERR] unbind common failed, err=-11
Nov 6 17:50:53 EAORA04 kernel: [33006.145827] nvgpu: 17000000.gpu nvgpu_tsg_unbind_channel:757 [ERR] Channel 478 unbind failed, tearing down TSG 8
Nov 6 17:50:53 EAORA04 kernel: [33006.148315] nvgpu: 17000000.gpu channel_free_invoke_unbind:842 [ERR] failed to unbind channel 478 from TSG
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: Wrong frequency range!
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: Wrong frequency range!
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: === 15Hz_PLUS_ZED_Multi_Camera[5333]: Connection closed (FFFFB7E4B840)=== 15Hz_PLUS_ZED_Multi_Camera[5333]: WARNING: CameraProvider was not destroyed before client connection terminated.=== 15Hz_PLUS_ZED_Multi_Camera[5333]: The client may have abnormally terminated. Destroying CameraProvider...=== 15Hz_PLUS_ZED_Multi_Camera[5333]: CameraProvider destroyed (0xffffb0acd8d0)=== 15Hz_PLUS_ZED_Multi_Camera[5333]: WARNING: Cleaning up 4 outstanding requests...=== 15Hz_PLUS_ZED_Multi_Camera[5333]: WARNING: Cleaning up 4 outstanding sessions...SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: Failed to set the metadata for the frame (propagating from src/services/gl/EGLStreamProducer.cpp, function setFrameMetadata(), line 466)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 533)
Nov 6 17:50:53 EAORA04 nvargus-daemon[1000]: SCF: Error InvalidState: (propagating from src/services/gl/EGLStreamProducer.cpp, function presentBufferInternal(), line 535)