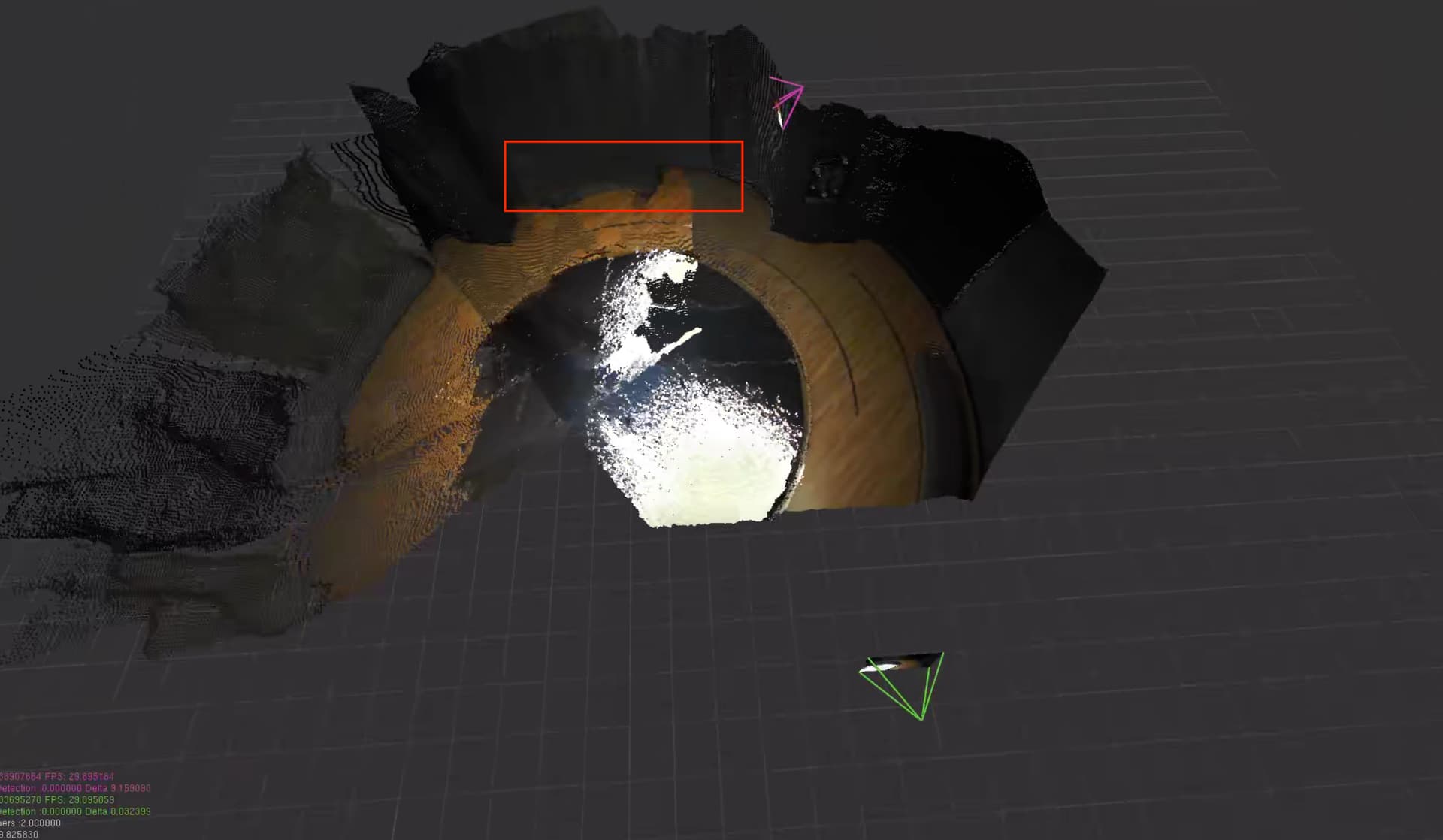
Hi, we are using a customized Object detection multi-camera sample using two cameras. See the below screenshot of the setup (720p, 30fps, ULTRA, because we experienced some crashes with the NEURAL module during longer runtimes).
As you can see, only parts of their tracking space overlaps. When a person stands in the area marked red, it can happen that they produce a ghost detection that is strangely placed ~1m in front of them. See the next screenshot where ID 47 and 100047 are the same tracked person, yet placed at different positions with the bounding box of 47 hovering in mid-air.
Even if the person walks, both the correct bounding box as well as the “ghost” moves with them. Interestingly, this happens significantly more often, if not only with people wearing dark clothes. My best guess here is that the pink camera produces the correct, the green one the incorrect tracking. Any ideas what could cause this issue?
Hi @tafkams
Thank you for reporting this issue.
Have you verified if the problem is also present in the latest v5.0.7 version of the ZED SDK?
If so, please record two SVO files in the same setup that can replicate this behavior and share them with us, together with the fusion configuration file and the source code.
You can use a file-sharing service (GDrive, Dropbox, etc.) to share them.
Thanks for the quick reply. This is running on 5.0.6 and I can’t see any bugfixes in regards to that in the release notes for 5.0.7. Is there any chance that updating might fix this?
We’ll try to provide an SVO for that in the long run, but cannot record an SVO at this point.
Could we check something else in the meanwhile like updating from ultra to neural after all? Do you have an idea what could cause this issue? It looks like the calculation of 3d position based on the 2d object detection somehow fails.
It appears that there’s an issue with the object re-identification that allows for associating each object detected by a camera with the same object detected by another camera.
It’s possible that the dark colors do not help the identification process, but it’s not possible to confirm this without SVOs that allow us to replicate the behavior in our labs.
I see! We will try to provide the SVO as soon as possible. Can I ask again whether we can expect any improvement in this regard by switching from 5.0.6 to 5.07.
Here is another video showing the issue. As soon as the pink camera looses the tracking, the bounding box is at the wrong position. As you can see it looks like the cameras are miscalibrated. But then I would expect to see that reflected in the point clouds being misaligned and for that issue to happen constantly.
I believe that the module has not been modified; however, modifications to other modules (e.g., Positional Tracking) can improve the behavior of other modules.
I was able to capture a recording of such a bug and could also verify that the issue is reproducible with a single camera. Please find attached an SVO and the corresponding calibration.json that features only a single camera.
The bug can be seen at the very end (frame 2780 onwards). The person steps back and the bounding box remains at the wrong position. The screenshot was recorded with the multi-camera object detection sample, ZED SDK 5.1 and detection_model set to MULTI_CLASS_BOX_ACCURATE