Hi! I’ m using a ZED 2i and ZED SDK v4.0.8. I use the following code to get image pairs from a pre-recorded .svo file:
image = sl.Mat()
while True:
if cam.grab(runtime_parameters) == sl.ERROR_CODE.SUCCESS:
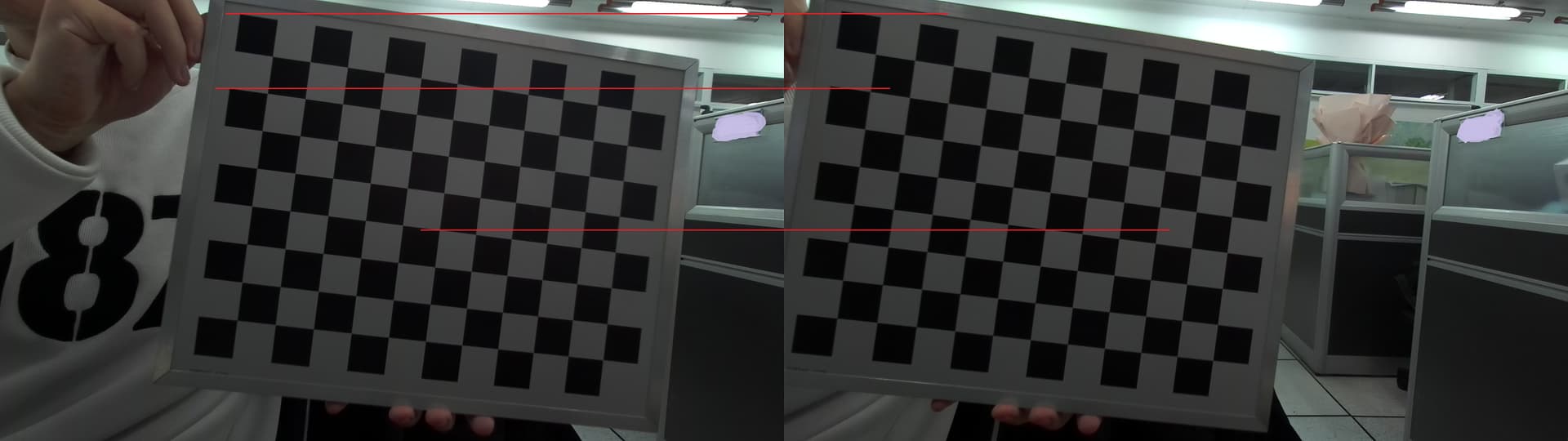
cam.retrieve_image(image, sl.VIEW.SIDE_BY_SIDE)
Then I want to try new stereo correspondence algorithm to get disparity map instead of DEPTH_MODE in SDK. We know the image pair need to satisfy standard form (corresponding points are constrained on the same image scanline) before stereo matching. It can be described with the following picture
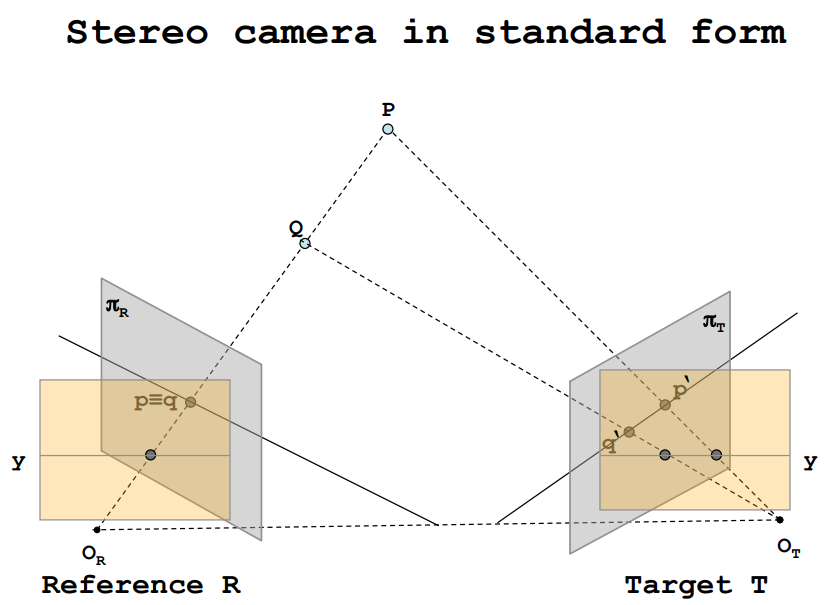
I want to know if the image pairs obtained using the SDK satisfy this condition? Do I need to do additional correction of the image pairs?