Hi everyone,
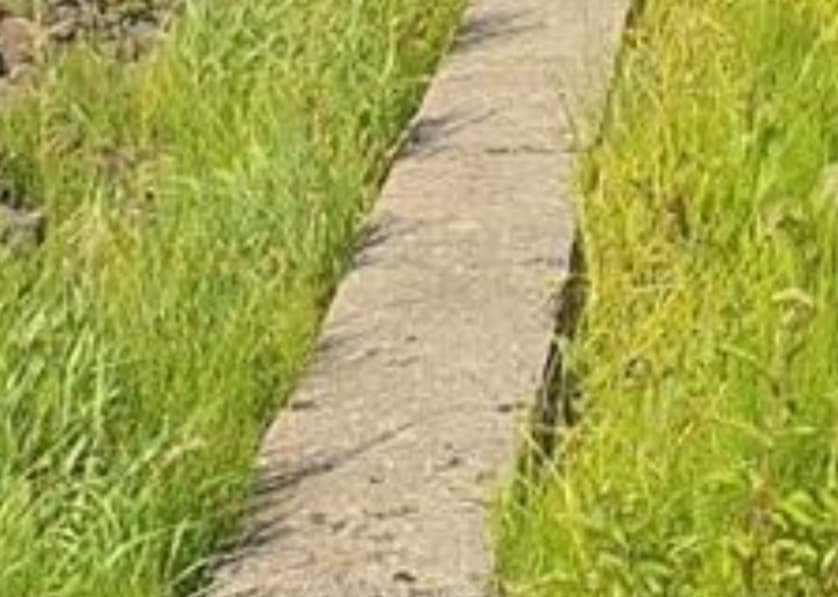
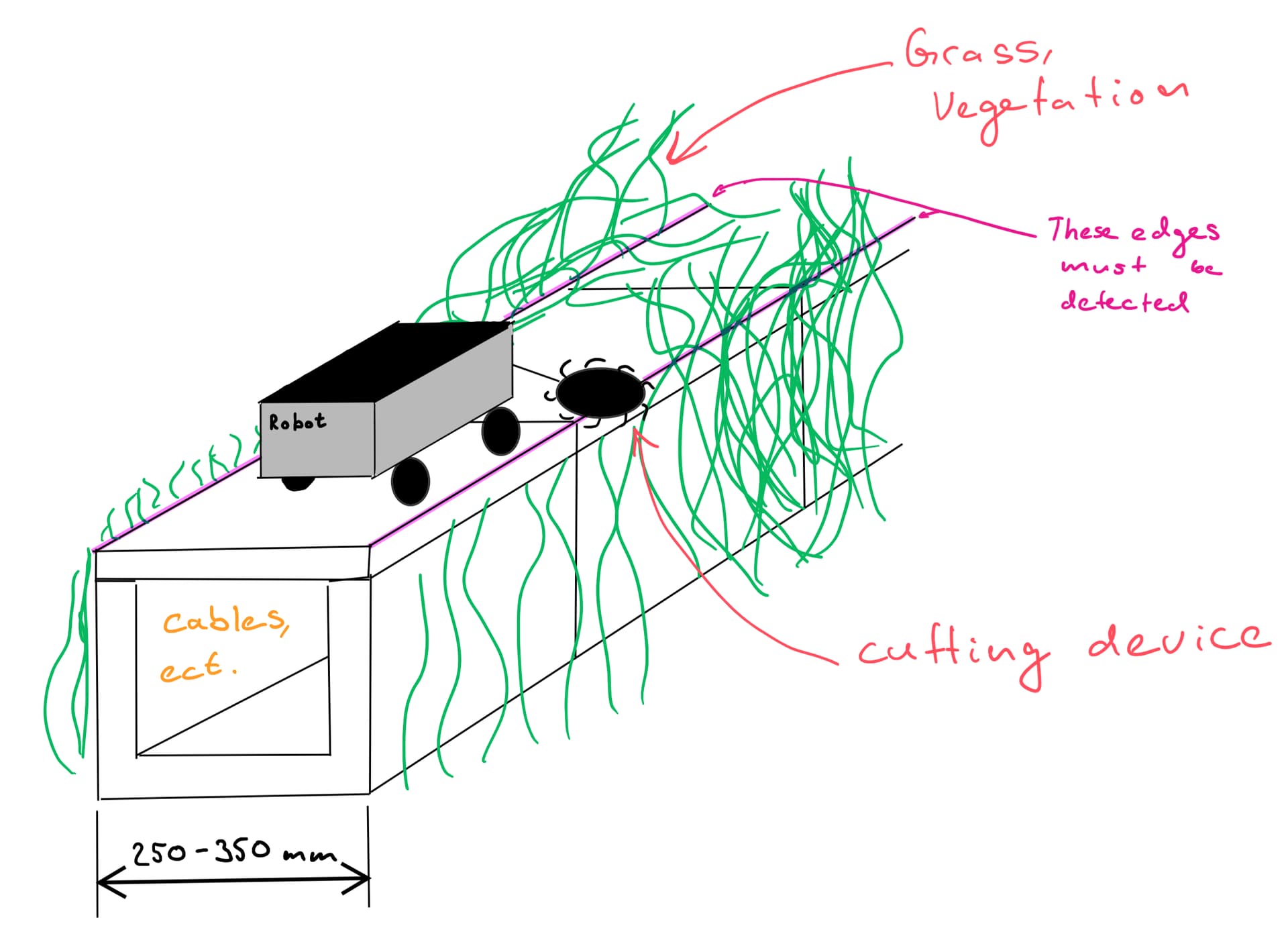
For my proof-of-concept project, I am developing a mobile robot that can autonomously drive along cable channels. A key part of the project is detecting the edges of these channels to feed positional data into the robot’s control system. The goal is to maintain a precise lateral distance to the channel edges while driving.
I have a few technical questions regarding the use of ZED cameras for this task:
-
Are ZED cameras suitable for reliably detecting the lateral distance to channel edges in outdoor environments (concrete channels with surrounding vegetation)?
-
Which ZED camera models would you recommend for this type of edge detection and real-time position measurement?
-
Are there specific tools, SDKs, or pretrained AI models provided that could help with edge detection and distance estimation?
I have attached two photos to illustrate the situation and the kind of environment where the robot will operate. Any advice on camera setup, sensor placement, or software workflow would be greatly appreciated.
Thank you very much for your help!