Hi,
I want to calculate the 3D camera coordinates of a point using the 2D image coordinates, the depth information given by the ZED 2i camera and the intrinsic camera matrix. My problem is that I am not sure how the depth is encoded. I simply use the ZED SDK to generate a depth map. If I look at my object’s depthmap value, is it the distance to the object (d) or is it the z-coordinate in camera coordinates (z_c^{(P)})?
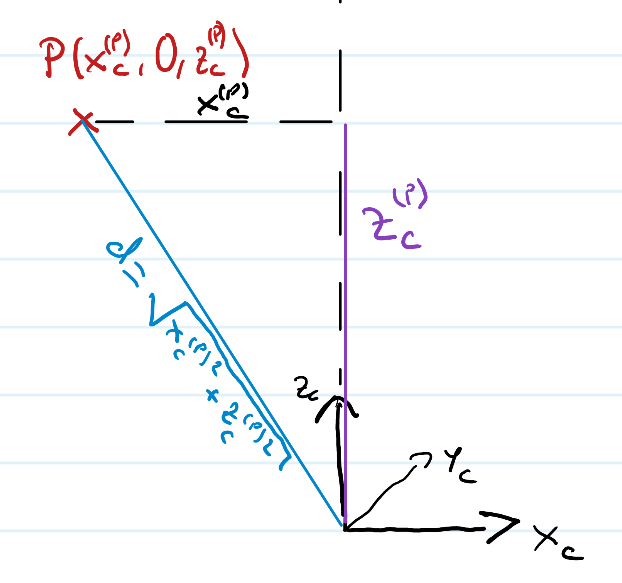
I upload an image illustrating my question. I am interested in object P (it is in the x-z plane with y=0 for simplicity). Does the depthmap encode the distance d or the camera z-coordinate?
Hi @KieDani,
You can find the formulas to compute these values here:
From what I understand, you want the point cloud information of a given point in the image. This is what the zed.retrieveMeasure method is for, and you can find an example of how to use it in our documentation: Using the Depth Sensing API - Stereolabs.
The depthmap would encode the dz_c distance, and the point cloud encodes the XYZ (or even XYZRGB) data.