Hi,
I have a little issue, and I was wondering if you can help me figure it out.
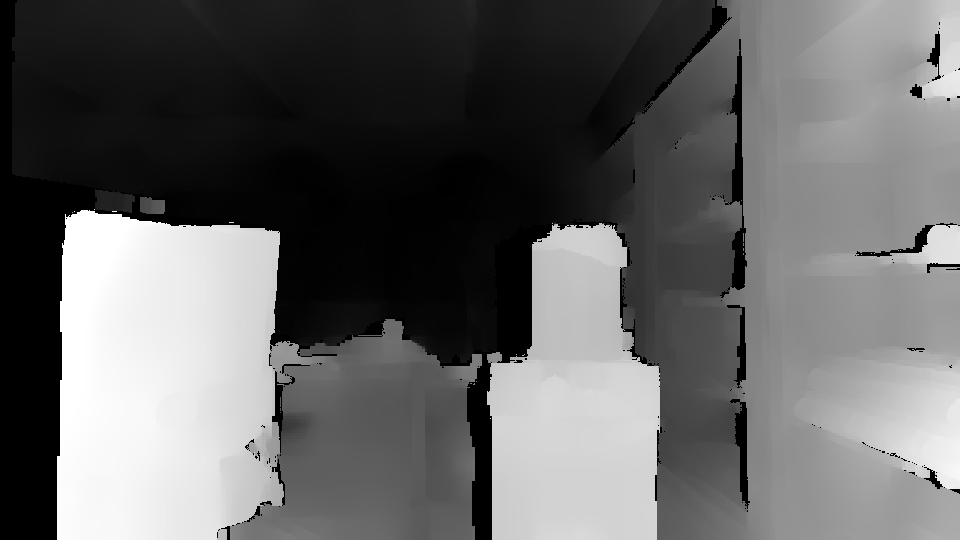
I’m using zed2 in python, and thank’s to zed sdk, I have a depth map that is quite good, but when I want to use the depth map using ROS, the result is really bad, and I still don’t understand why I have this output (using cvbridge or rviz)
Hey, thank you for your answer,
The thing is I know the problem is with normalization, but I was wondering if there is a way to use the API with ROS, otherwise I cannot use the functions proposed
Please note that I am not too familiar with using ROS with ZED but am familiar with both separately. Assuming that you are using a Python/C++ program where you have created your own ROS node and are subscribing to topics or calling ros services provided by the ZED node, it should be decently straight forward to import and use the zed api in the program where you created your node. Assuming you can get the depth map either from a rostopic from the ZED node or via the ZED api, then I presume you should just be able to apply normalization (new_value = value/max_range * 255) and pass it into any data visualizer you are using.