I am conducting an experiment to synchronize a few sensors, in an effort to calibrate out some inconsistency in the frame rate of the Zed 2i. In this setup I have a calibration target suspended from two strings, as a pendulum, with the Zed 2i looking down from above:
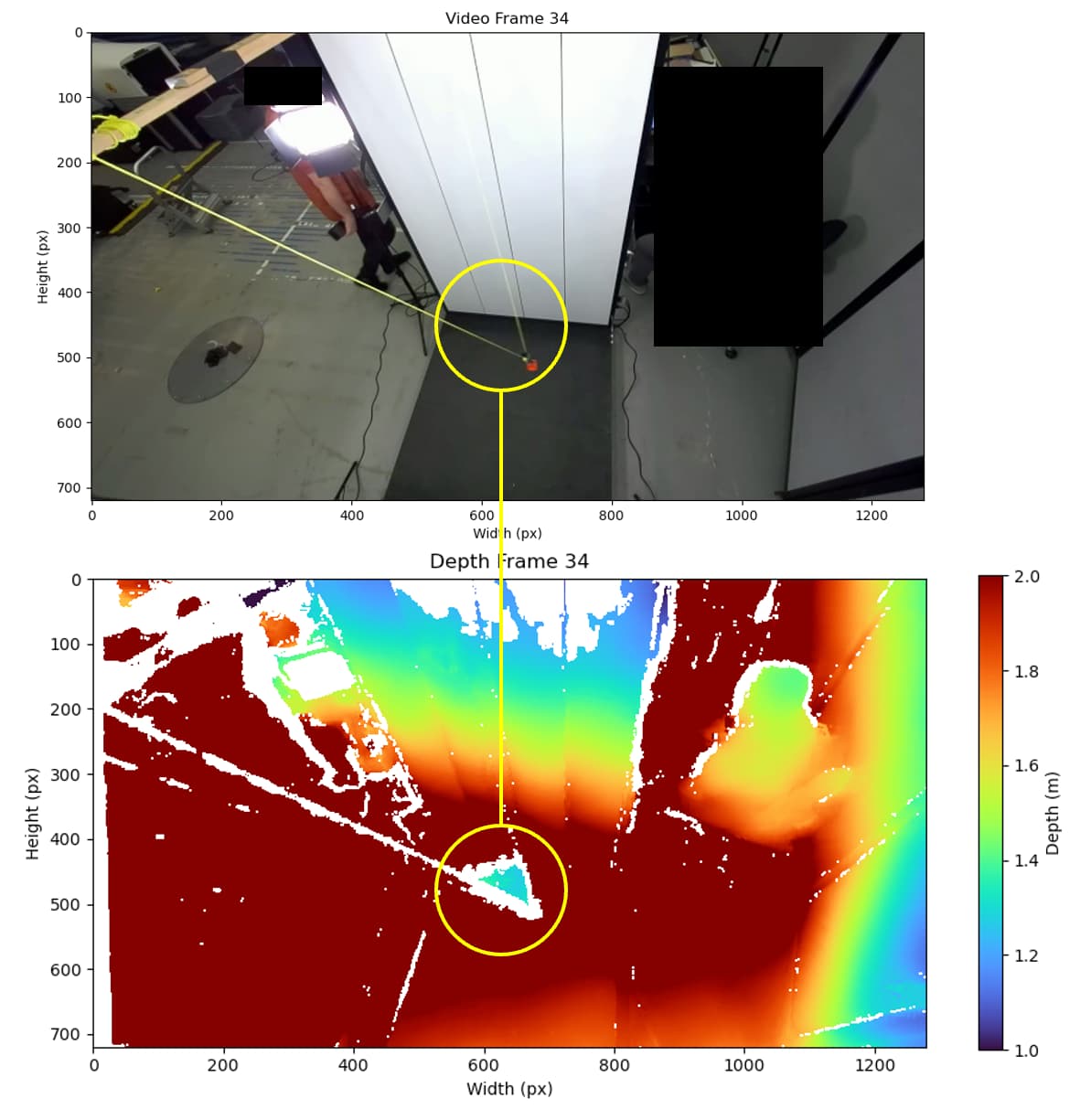
I am consistently seeing the “soap bubble” illustrated in the frame above; what should be red (floor, a depth of over 2m from the camera) is being reported as the depth of the pendulum string.
It looks like the dark surface of the floor could be causing uncertainty in pixel correspondence calculations. Is this a known issue, and is there any way to diagnose and mitigate it? I realize that the neural depth estimation might be a black box making this difficult – open to suggestions!