I’ve been working with the ZED SDK in Python, and I wanted to record poses with the origin at the center of the stereo rig instead of the default left camera. I am using ZED SDK 4.0.8 on my jetson nano.
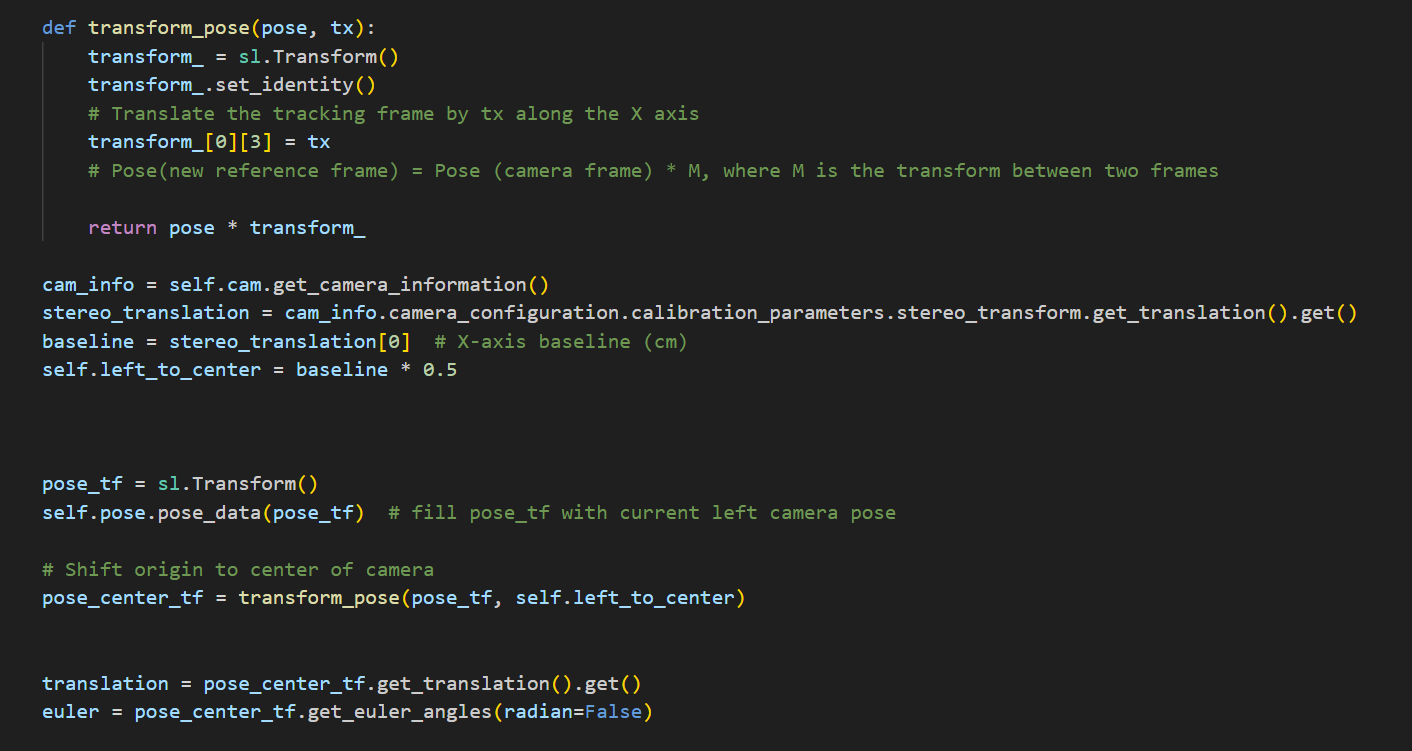
I’ve tried to modify the matrix and used this link as well to make it work but no progress whatsoever. Link: Coordinate Frames - Stereolabs . Below is a code snippet:
I assume your error TypeError: ‘int’ object is not subscriptable. happens on the line
transform_[0][3] = tx
It is because for now (with the most recent pyzed version as well as for the 4.0.8 version you are using), no operator[] is implemented in the sl.Transform class. If you feel like it could be a good addition, feel free to add it in zed-python-api/src/pyzed/sl.pyx at master · stereolabs/zed-python-api · GitHub and to open a PR so that we add it in a following patch
Otherwise, to modify the sl.Transform, you can use one of the following methods: