Hi all,
I have two questions regarding my ZED X setup:
-
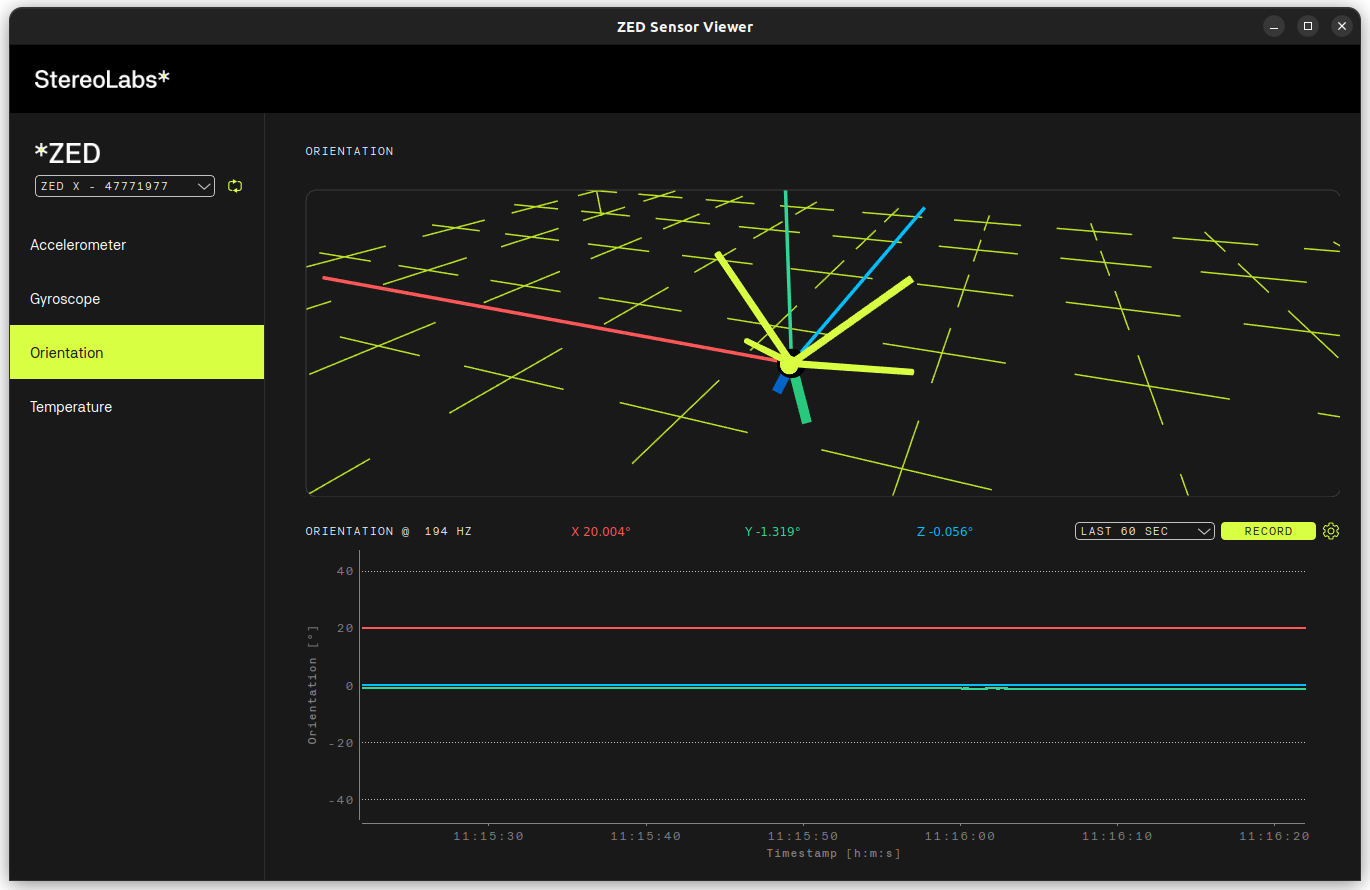
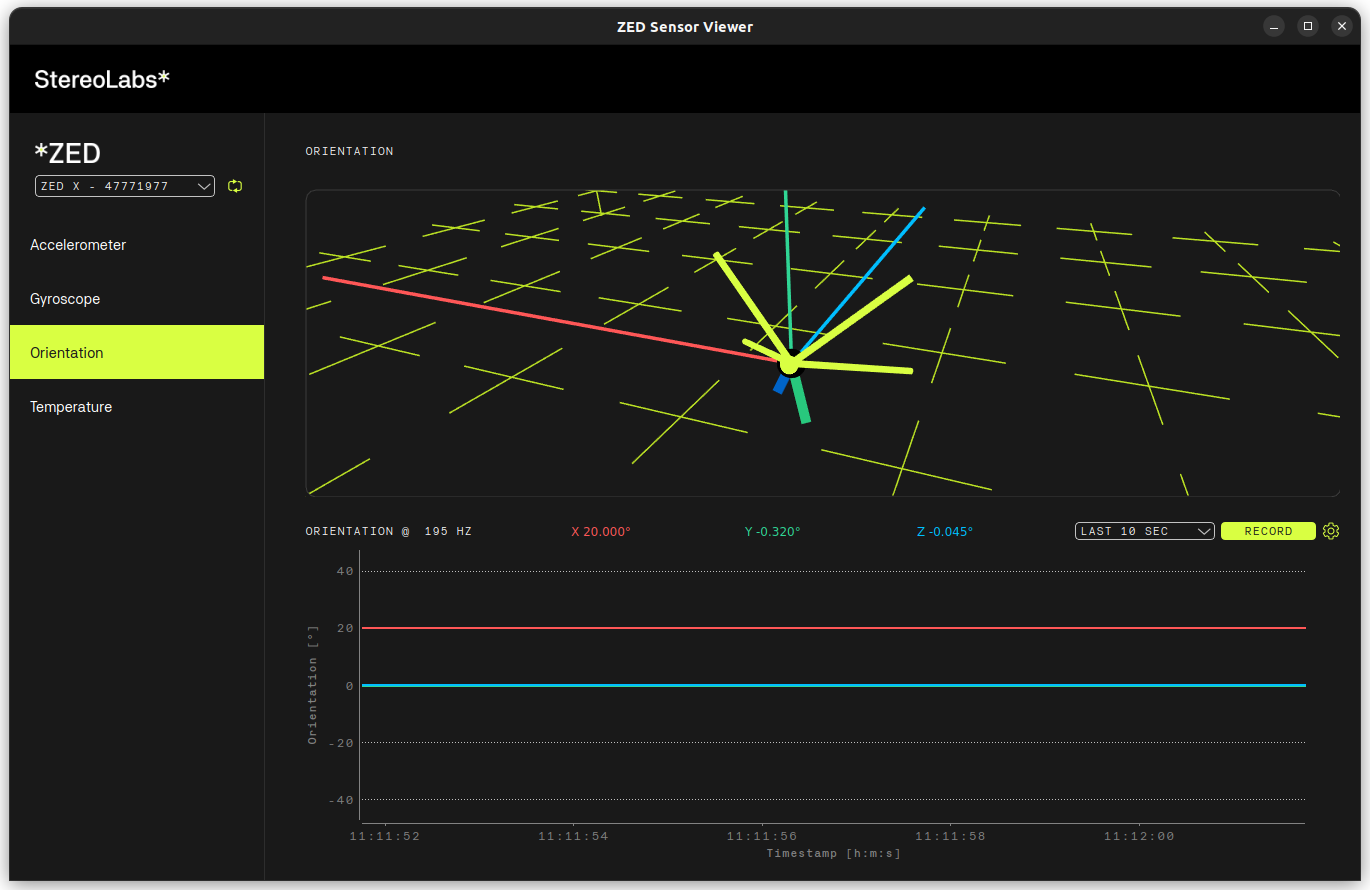
Yaw drift in ZED Sensor Viewer
My camera is completely static and when I open the ZED Sensor Viewer, I notice that the yaw orientation starts in zero and slowly increases over time, as shown in the attached image.-
Is this a known bug or expected behavior?
-
I tested some static objects and, even after 1 hour, the detections are still returning the same measurement, so the drift doesn’t seem to affect the results.
-
-
Improving coordinate stabilization
My custom detection model works fine and detects objects very quickly, but I’ve noticed that the 3D coordinates “float” for about 15 seconds before becoming precise and stable.- Is there any parameter or recommended approach to improve coordinate stabilization?
Here’s my current setup:
fps: 15
depth_mode: NEURAL
depth_max: 3.0
depth_stabilization: 15
resolution: HD1200
saturation: 5
sharpness: 8
gamma: 1
gain: 50
exposure: 50
exposure_compensation: 50
Any advice or insights would be really helpful!