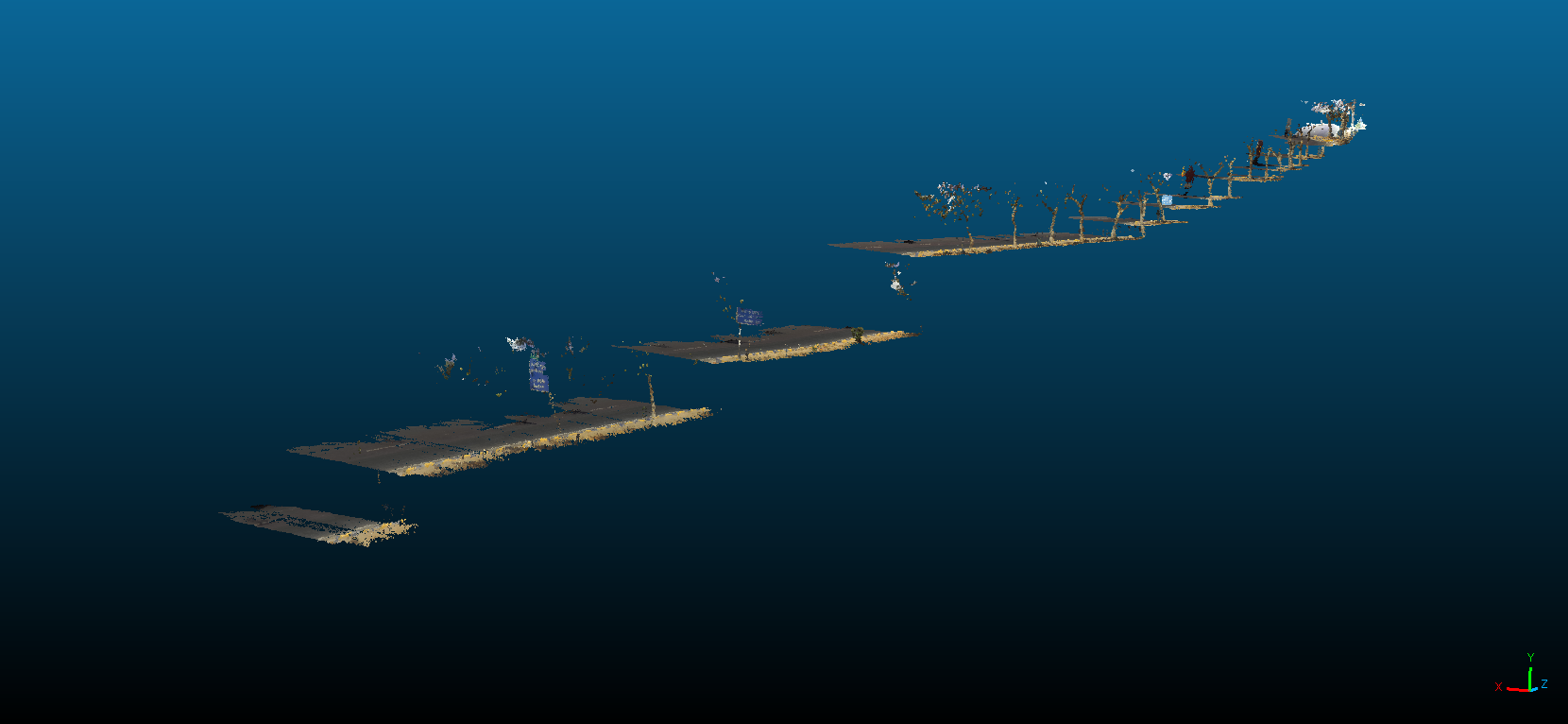
I surveyed an outdoor road using one ZED 2i camera with GPS, mounted on the roof of a car. During the survey, the car was moving at a speed of only 15–20 km/h. I captured an SVO2 file during the run. After the survey, I used ZEDfu to convert the SVO2 file into a point cloud in PLY format. My query is that the resulting point cloud shows a rumble or break in a continuous section, even though the road was flat and on a plane.
Hi @nitingarg
can you share the SVO you recorded with us?
It could be useful to understand the cause of the issue and eventually send you the correct parameters to use.
Please send a link to download it to support@stereolabs.com because I suspect it’s too big to be sent by email.