Hi,
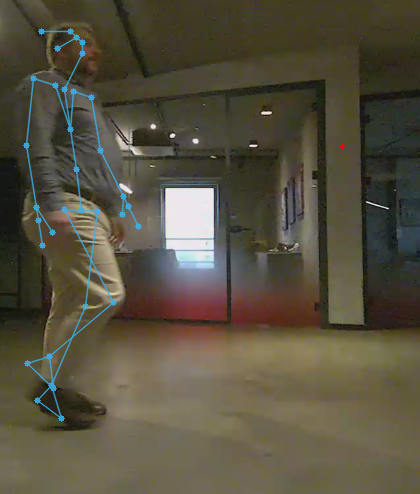
I am trying to draw a line behind the detected people by recording their previous positions using cv2. However, obj.keypoint_2d[27] pixel values of the 27th point I got in this way are far away from the detected person.
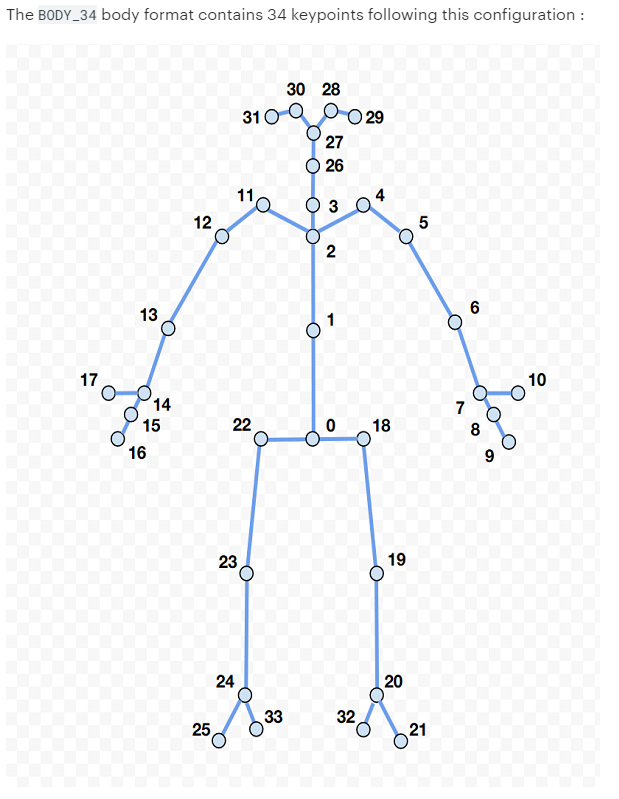
As you can see here I am using 34 keypoint body format.
So the 27th key point you will see should be in the head. I should be able to put the point I want in these pixel values, but as you can see, it puts it at a very different point. And this is not a fixed difference. As the detected person moves, the distance may increase or decrease in x and y.