Dear Development Team,
I have encountered a couple of issues with the Bird View feature in our project and would like to discuss potential solutions.
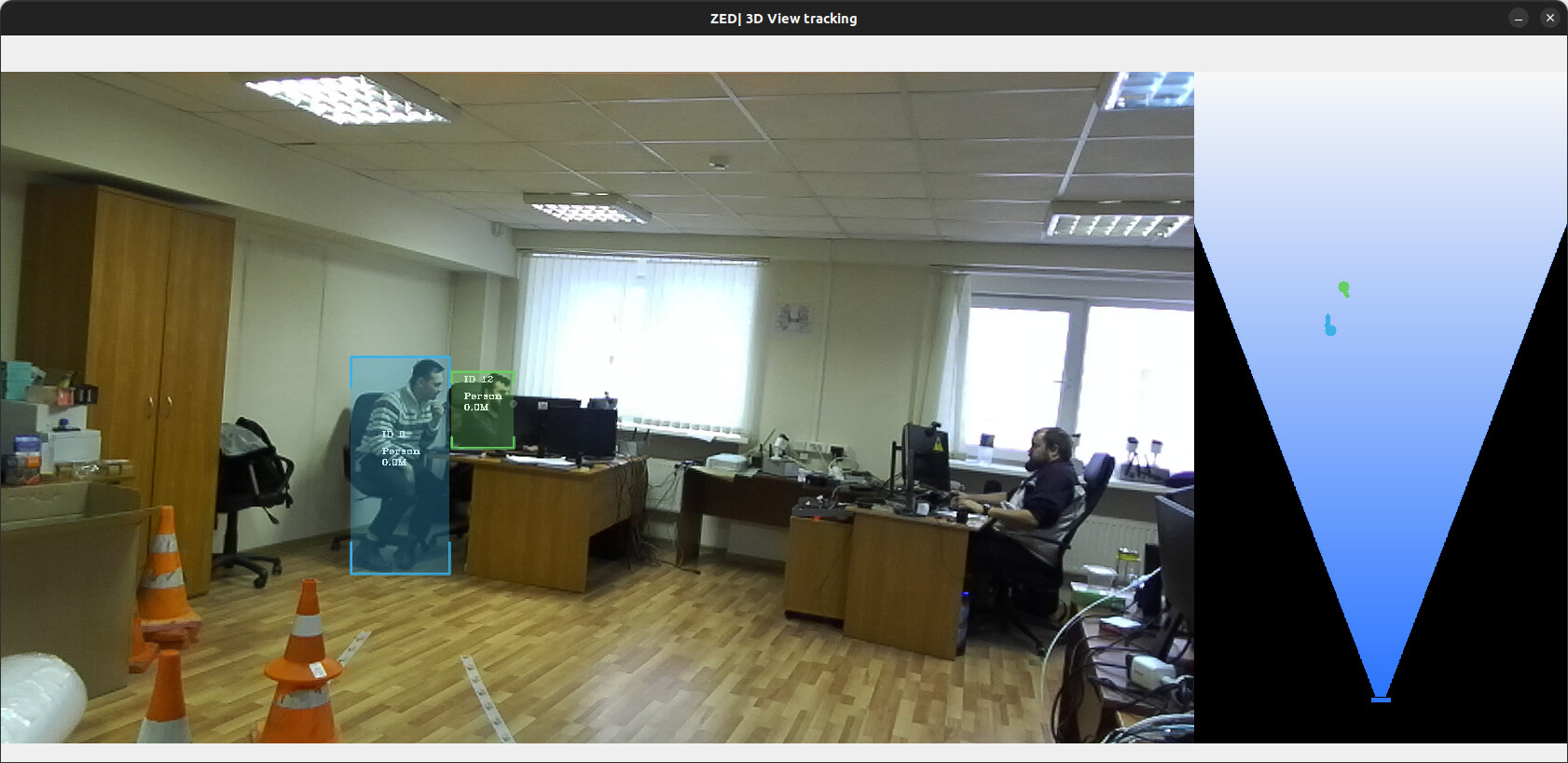
Firstly, I have noticed that the scaling within the Bird View does not accurately represent real-world distances between objects. Could you please clarify the scaling parameters currently implemented? There may be a need for additional calibration or adjustment of the projection parameters to ensure accurate representation.

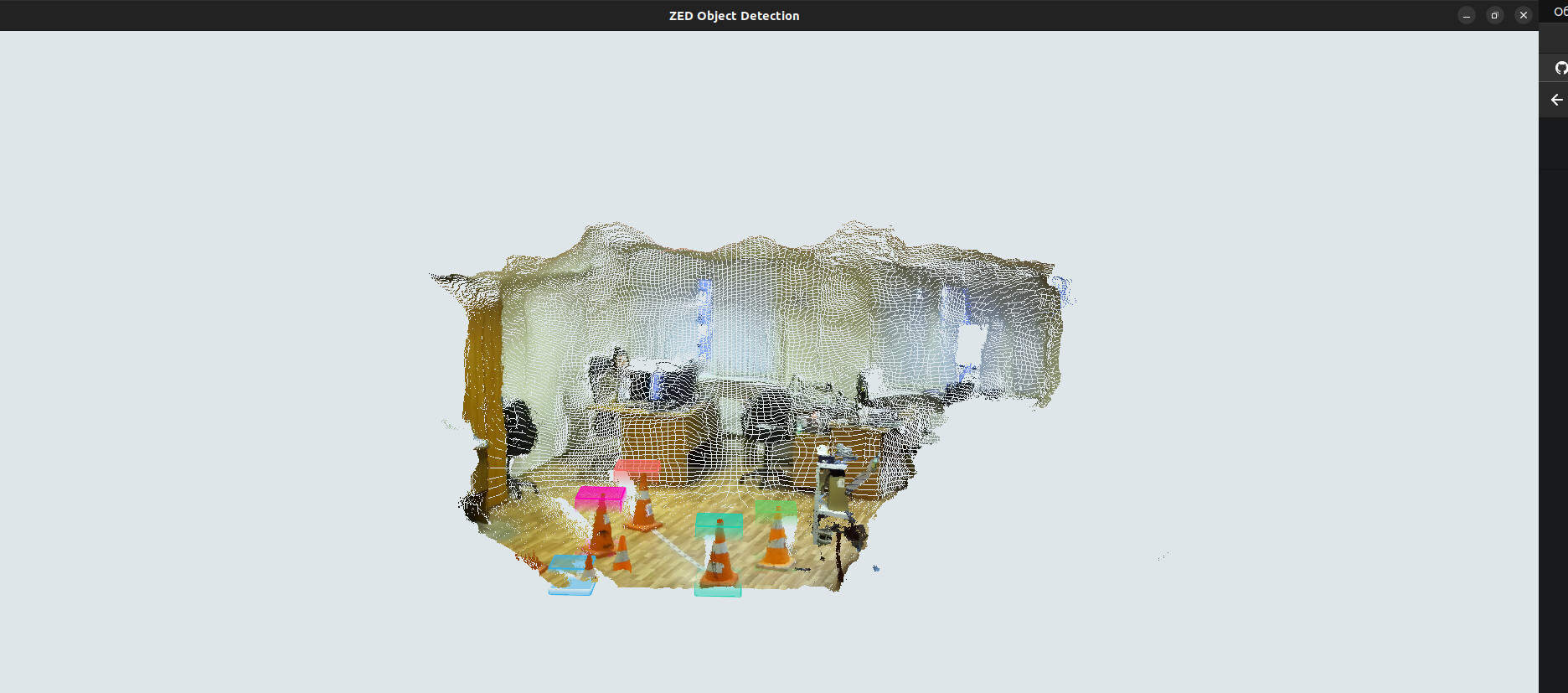
Secondly, the quality of the 3D imagery is suboptimal and does not meet the expected level of detail. Could you provide information on the current rendering settings? The issue may be related to low-resolution textures or limitations in the post-processing algorithms used.
I would appreciate technical details on the current configuration and possible ways to programmatically optimize these aspects. If necessary, I am willing to participate in testing proposed solutions to expedite the resolution of these issues.
Moreover, resolving these matters promptly is of the essence as we are preparing for an upcoming exhibition. It is crucial that we present our project in the best light, and these graphical inaccuracies could significantly undermine the experience we intend to deliver.
I look forward to your swift response and proposed action plan.
Best regards,
Shakir
Hello and thank you for contacting us,
I assume you are talking about this sample : https://github.com/stereolabs/zed-sdk/tree/master/object%20detection/birds%20eye%20viewer
Since this code is open source, you can freely dive into it and tune the parameters to your liking. This samples are made exactly for that. The code is pretty easy to read and to modify.
if it would be easy I didnt write you here
Then, tell me a bit more about your difficulties, what language are you using? I can guide you a bit through the code.
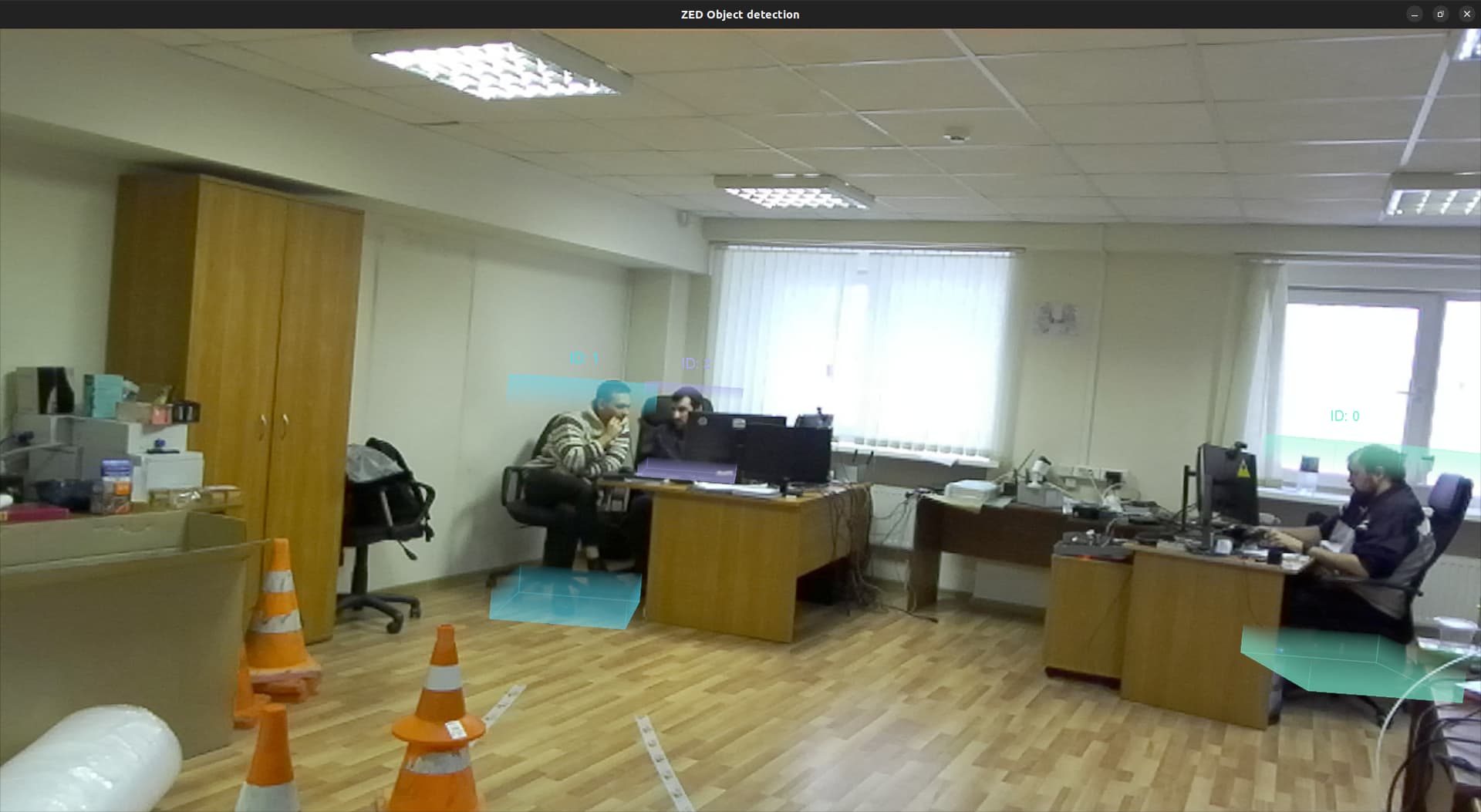
I’m encountering a problem with visualization in two different scenarios using the ZED SDK for object detection. When I run zed-sdk/object detection/birds eye viewer/python , the result looks great in terms of scale and tracking, providing a clear bird’s-eye view.
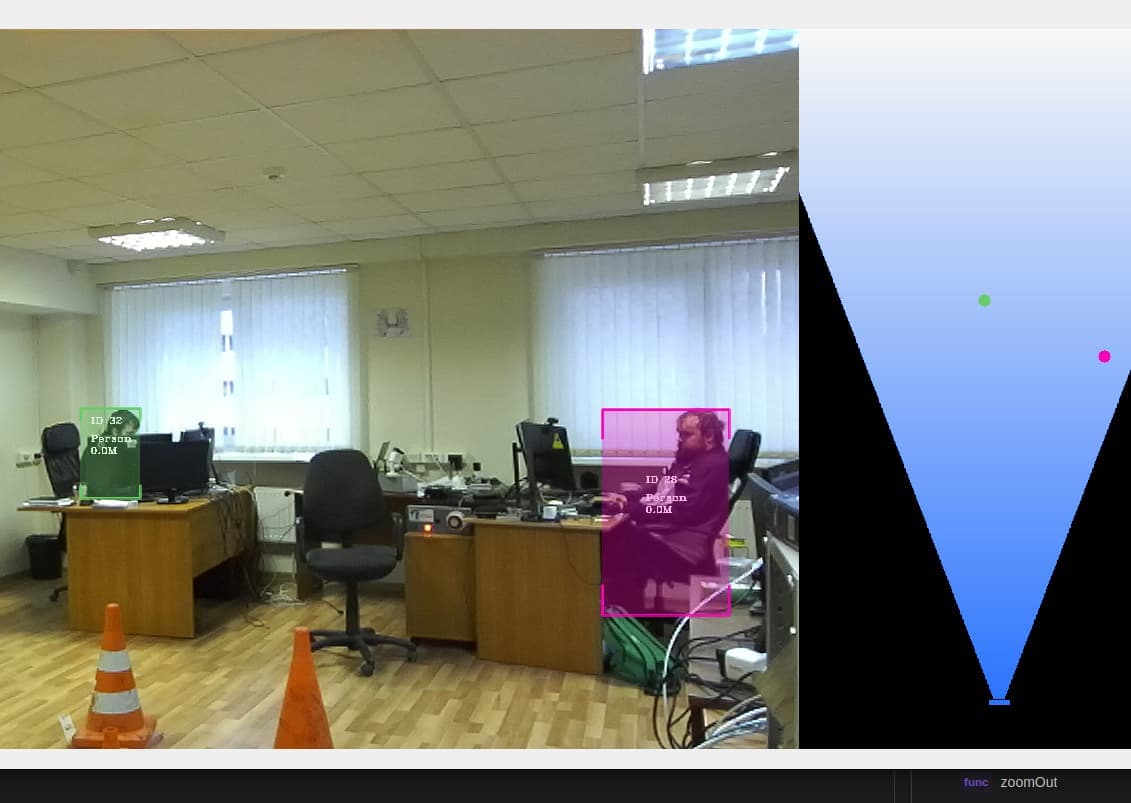
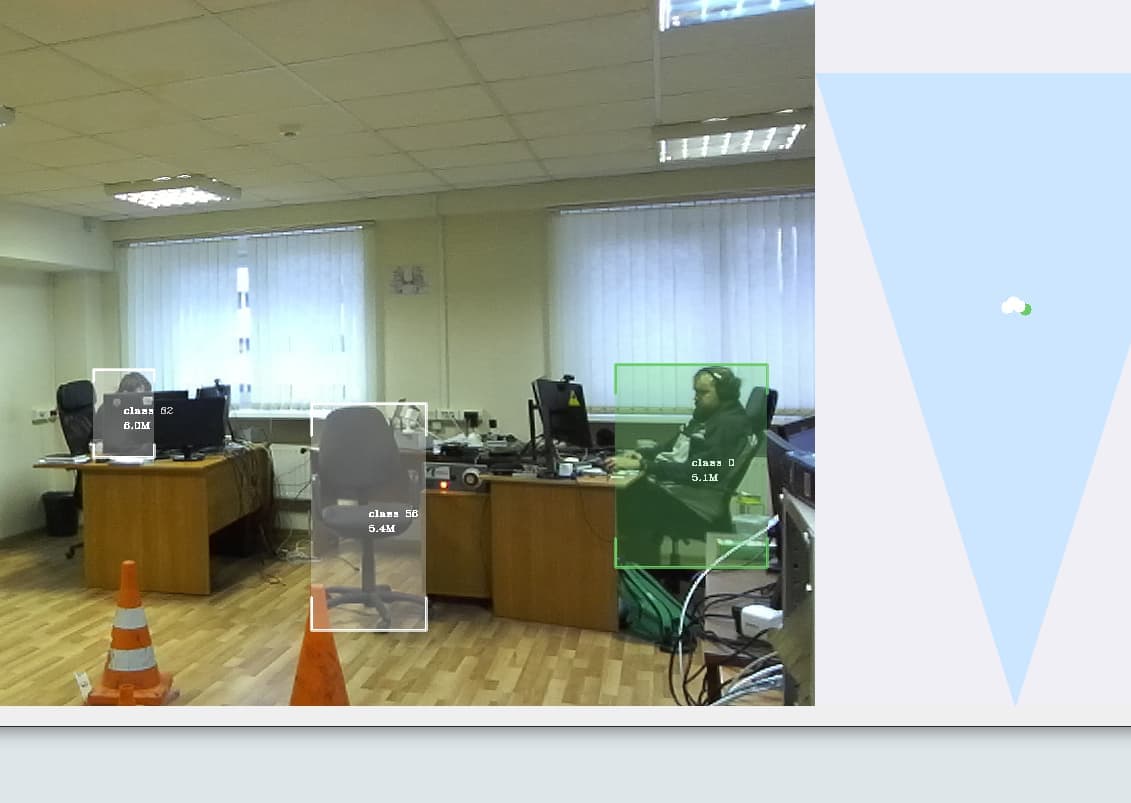
However, when I switch to zed-sdk/object detection/custom detector/python/python ch_yolov8_new$ , the scales seem incorrect and do not match reality. How can I urgently fix this scaling issue in the second scenario?
Hi,
We don’t have a ch_yolov8_new sample. Did you write it yourself ?
You should compare your code with the bird eye viewer to see what’s wrong.
i run your script zed-sdk/object detection/custom detector/python/pytorch_yolov8/detecor.py
and I have the same problem
You can check it by yorself
I had been waiting yet the answer
I would like to request the implementation of 3D box visualization on a 2D image, similar to the functionality presented in the file “/zed-sdk/object detection/image viewer/python/object_detection_image_viewer.py.”
Additionally, I need to incorporate tracking and top-down view functionalities, similar to those implemented in the code “/zed-sdk/object detection/birds eye viewer/python/object_detection_birds_view.py.”
Furthermore, I would like to have the ability to integrate my own model weights, as provided in the “best.pt” file. Your assistance with this matter would be greatly appreciated.
Hello,
I’m very sorry, these samples are meant to show people examples about how to use the SDK, but we don’t develop your programs for you.
About the weights, I guess you found our custom detector repository. This one shows you how to use your own model and weights to detect stuff, and then to ingest it into the SDK.