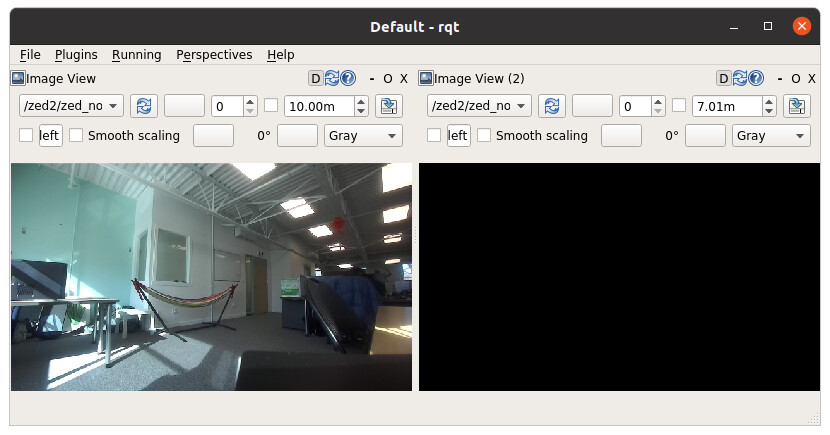
I am using the ZED 2i Stereocamera for an project. Unfortunately, I was not able to see the PointCloud of the Stereocamera in Rviz, while the camera pictures get displayed. I was trying to solve the problem by myself and I found out when I start the ZED_Depth_Viewer of the ZED SDK tools I get an error msg while the ZED_Explorer works fine. Error Msg is:
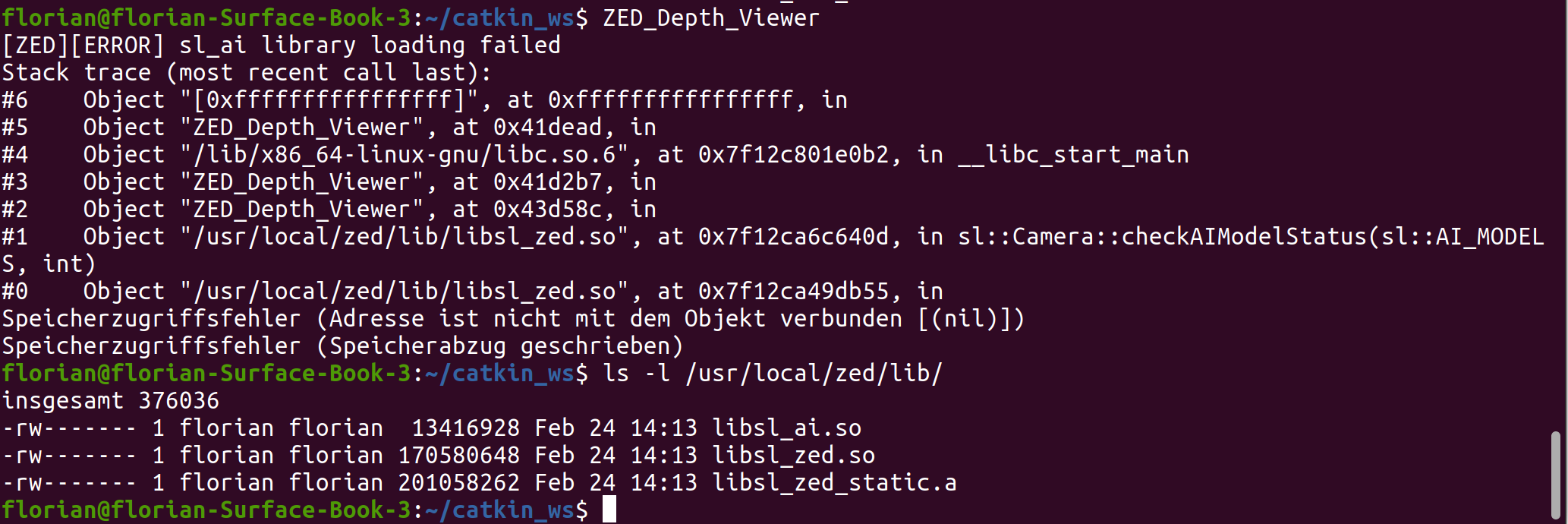
[ZED][ERROR] sl_ai library loading failed
Stack trace (most recent call last): #6 Object “[0xffffffffffffffff]”, at 0xffffffffffffffff, in #5 Object “ZED_Depth_Viewer”, at 0x41dead, in #4 Object “/lib/x86_64-linux-gnu/libc.so.6”, at 0x7f12c801e0b2, in __libc_start_main #3 Object “ZED_Depth_Viewer”, at 0x41d2b7, in #2 Object “ZED_Depth_Viewer”, at 0x43d58c, in #1 Object “/usr/local/zed/lib/libsl_zed.so”, at 0x7f12ca6c640d, in sl::checkAIModelStatus(sl::AI_MODELS, int) #0 Object “/usr/local/zed/lib/libsl_zed.so”, at 0x7f12ca49db55, in
Speicherzugriffsfehler (Adresse ist nicht mit dem Objekt verbunden [(nil)])
Speicherzugriffsfehler (Speicherabzug geschrieben)
Has anybody an idea what the problem can be on my installation? I have installed
ZED SDK 3.7
Ubuntu20.04
CUDA 11.6
I just saw that SDK 3.7 is supported with CUDA 11.5 and not explicitly with CUDA 11.6. Can that be the problem? Because this library file seems for me to be available (see screenshot)
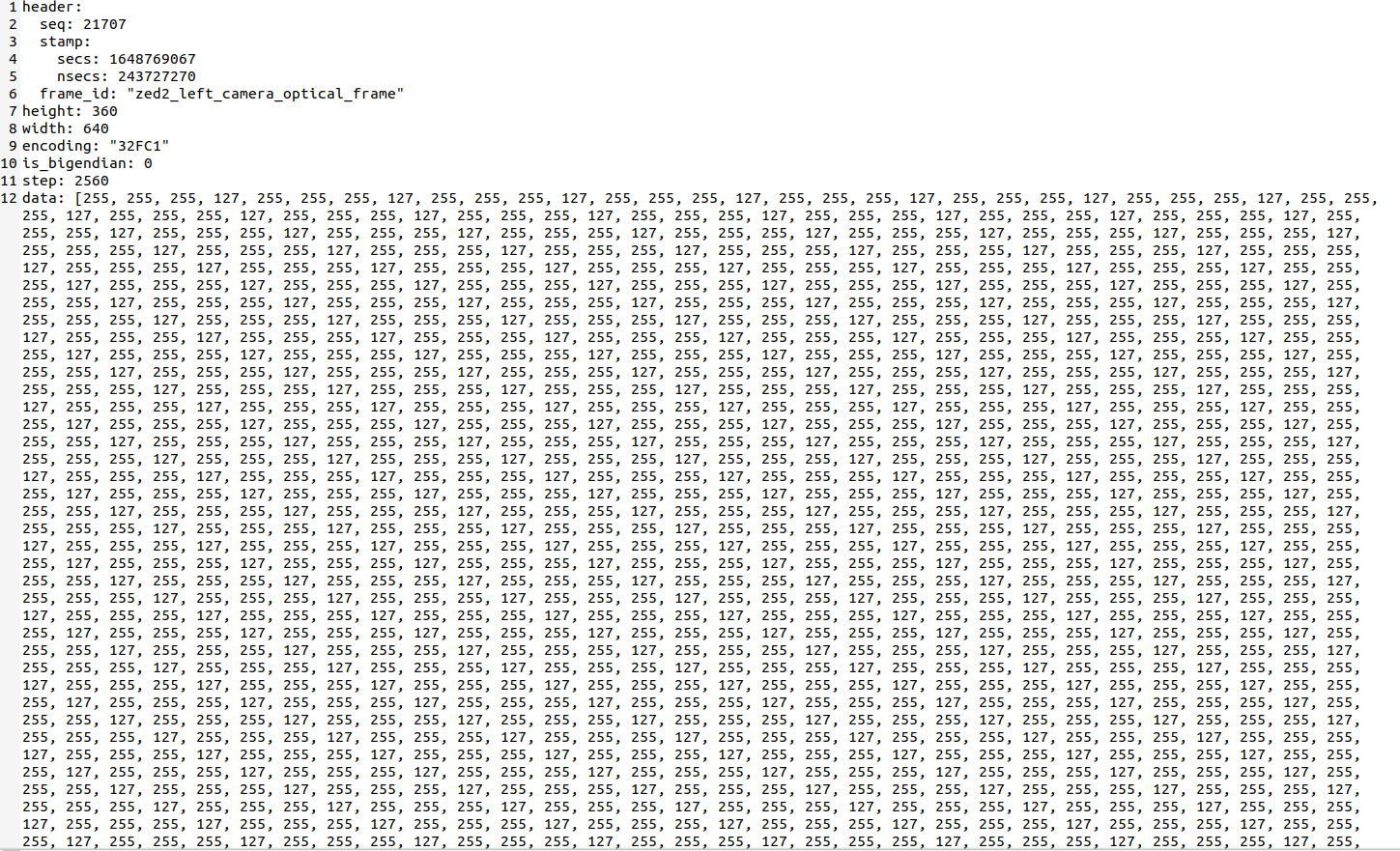
Also, the depth message by rostopic echo /zed2/zed_node/depth/depth_registered is attached.
I’d really appreciate it if you can take a look at this issue.
Only with neural depth. I tried to use the ZED_Depth to see the depth result but also failed. It says that the neural network cannot be optimized on my device. I guess this issue is related to the docker container environment because everything is working fine if running on the host instead of in containers.
 :checkAIModelStatus(sl::AI_MODELS, int)
:checkAIModelStatus(sl::AI_MODELS, int)