Thanks Antoine for your answer,
I built my own program based on ZED SDK 3.7
I tested the following sense mode :
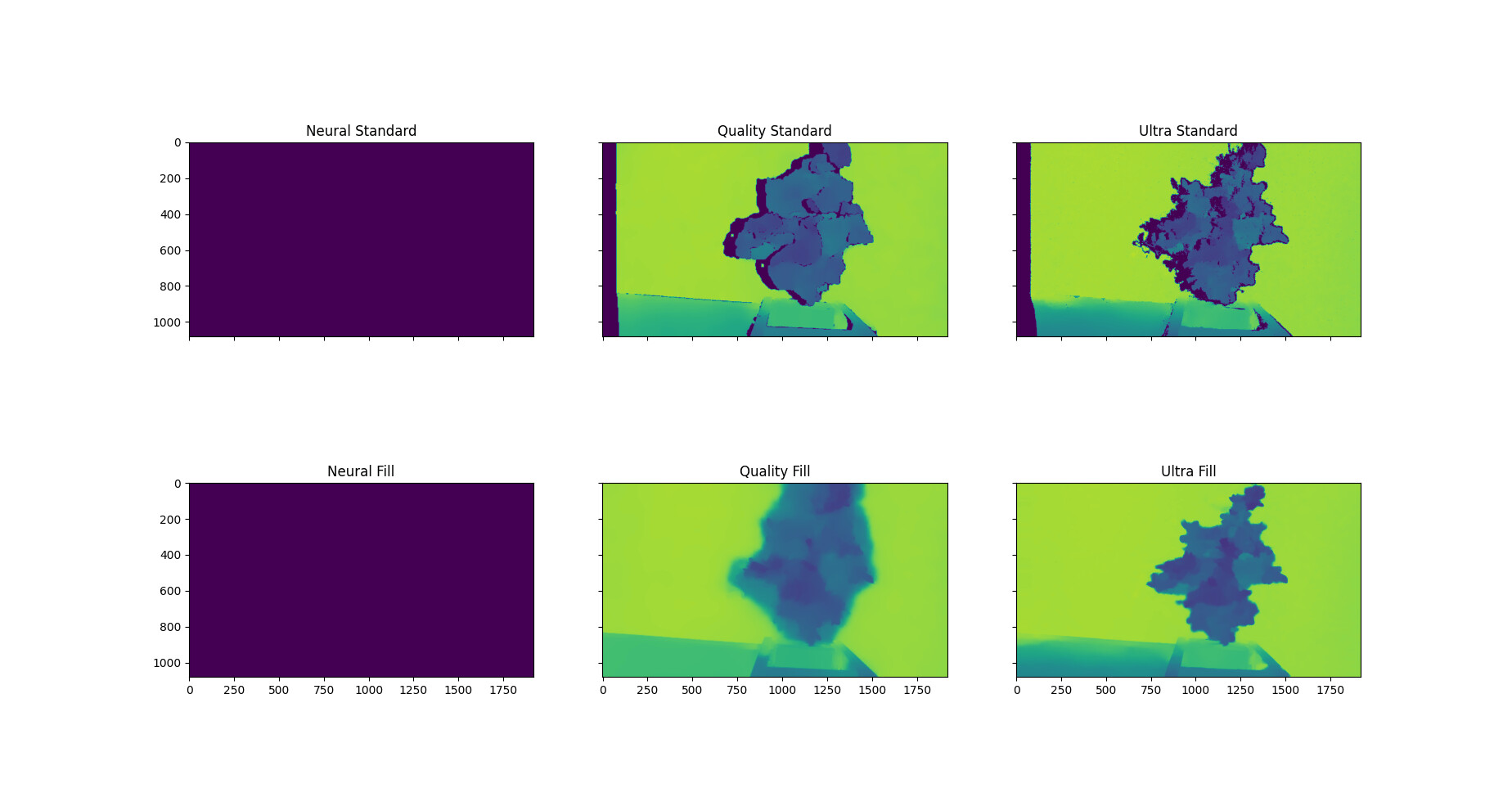
- ultra ( the one you see on the picture)
- quality (not successfull because it looked like the image was blurrred and I wanted more details)
- neural with no result at all because i received only NAN the the resulting matrix. (I mentionned it in this post : ZED Depth Mode Neural with Jetson Nano)
I did not set minimum and maximum distance (I only did it after acquisition using numpy clip function)
Here the images with the different mode (also tested with the standard / fill flag):