Hi @cao
Welcome to the Stereolabs community.
I see a bit of confusion in what you write, so I try to better explain those concepts.
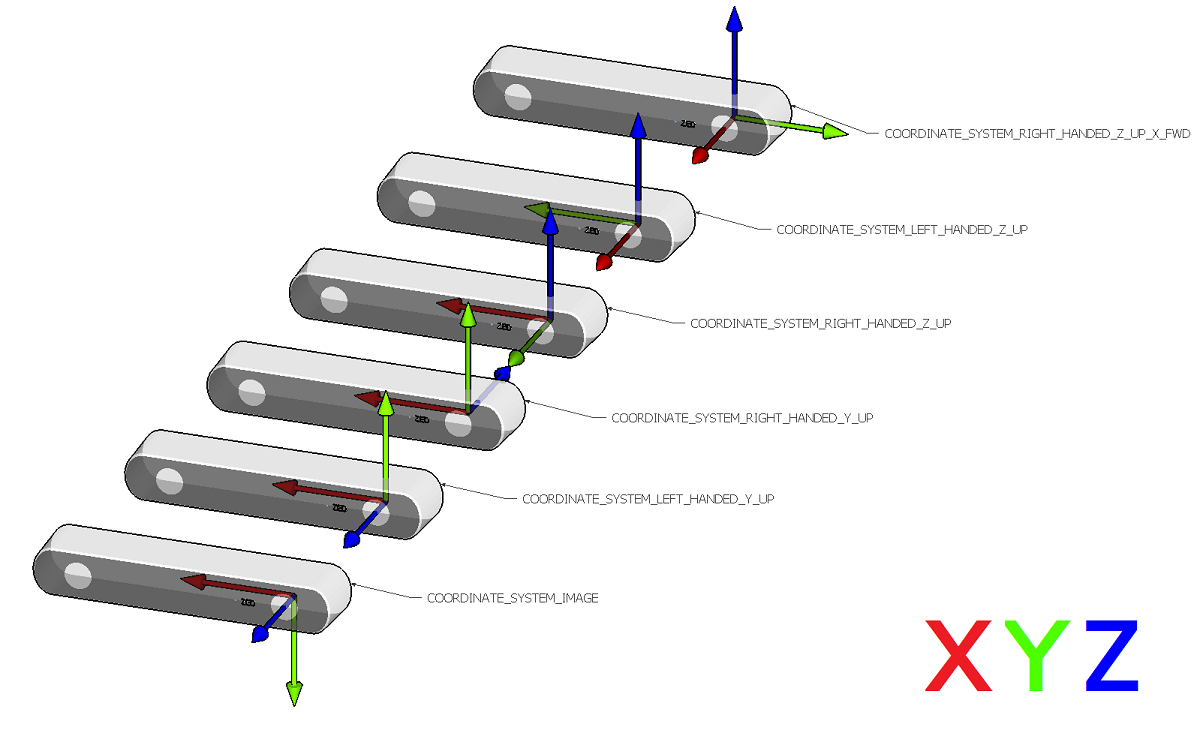
The parameter coordinate_system of the structure InitParameters defines how the axis of the reference frame are orientated:
The parameter measure3D_reference_frame of the structure RuntimeParameters defines where is the origin of the reference system defined by InitParameters.coordinate_system.
If the origin is REFERENCE_FRAME.CAMERA the coordinates of each point of the cloud is always referred to the center of the left camera sensor.
If the origin is REFERENCE_FRAME.WORLD the coordinates of each point of the cloud is always referred to the first position of the camera when the positional tracking module is started.