Very late replay, but a few observations:
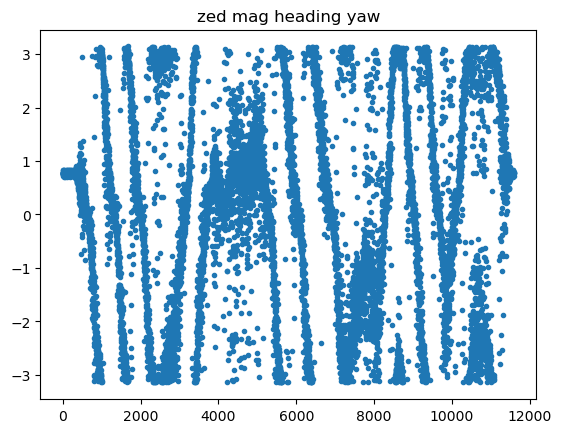
- The heading directly from the zed API (eg sens_data.magnetometer.magnetic_heading) is very noisy. I’m not sure why.
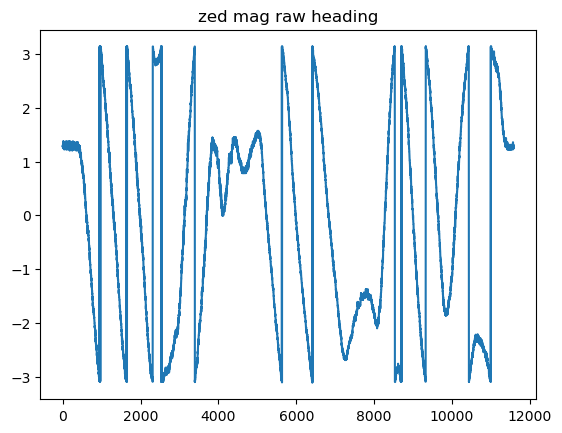
- I had much more success using the uncalibrated magnetic field data, applying a simple hard iron calibration (see Magnetometer calibration issue on large robot - #4 by thandal), which gives a much more sane result: