Hello
I want get z-direction normal vector at each frame
I use retrieve_measure with MESURE.NORMALS but result is not what I expected.
Hello and thank you for reaching us out,
MEASURE.NORMALS give you a matrix containing X,Y,Z,0. So you’ll have to get the third item after that.
https://www.stereolabs.com/docs/api/python/classpyzed_1_1sl_1_1MEASURE.html
Also, depending with the librairies you’re in interface with, Z is not always the up vector, it can be Y. In the SDK we chose to let you configure that in the init_parameters coordinate_system
https://www.stereolabs.com/docs/api/python/classpyzed_1_1sl_1_1COORDINATE__SYSTEM.html
Best regards
Antoine
Antoine Lassagne
Senior Developer - ZED SDK
Stereolabs Support
Hello. Thank you for your reply.
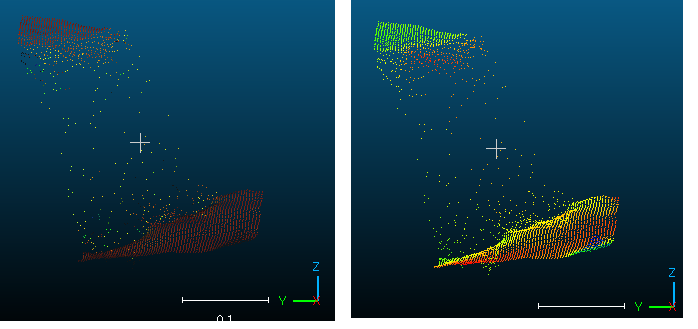
Expected result is on the left and the result obtained from ZED SDK is on the right side.
It seems to be related to the value of Z
How can I get the expected results?
Hello again,
I don’t understand precisely what you are trying to obtain. You images show point clouds of different colors. I guess that the color represent the direction of the normal.
- Did you try to change the up vector ?
- How did you obtain the “right” image ?
Maybe, can you share a sample of code ?
Best regards
Antoine Lassagne
Senior Developer - ZED SDK
Stereolabs Support
Hello.
Sorry for lack of the information
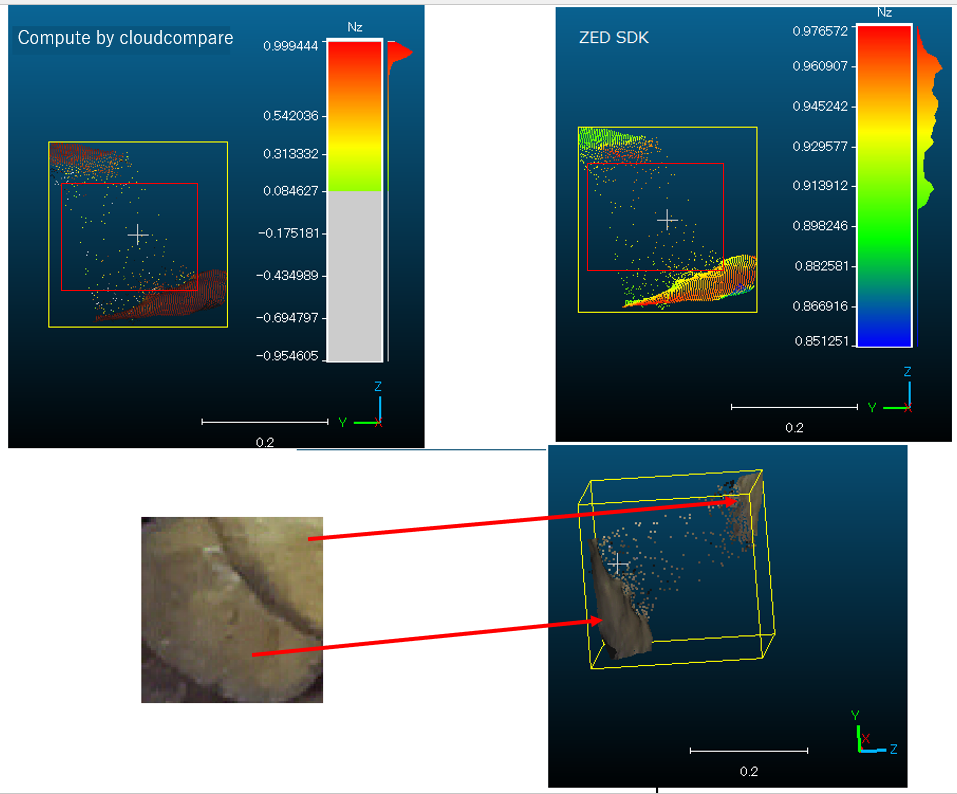
The colors in the figure represent the size of z-normals.
The range of z-normal is different between the two figures.
I think z-normals between 2 planes will be far from 1.
I couldn’t attach the file because I’m a new user, so I’ll show it here.
input_type = sl.InputType()
input_type.set_from_svo_file("test.svo")
init_params = sl.InitParameters(input_t=input_type, svo_real_time_mode=False)
init_params.depth_mode = sl.DEPTH_MODE.NEURAL
init_params.coordinate_system = sl.COORDINATE_SYSTEM.RIGHT_HANDED_Y_UP
init_params.coordinate_units = sl.UNIT.METER # Set units in meters
err = zed.open(init_params)
if err != sl.ERROR_CODE.SUCCESS:
exit(1)
resolution = zed.get_camera_information().camera_resolution
image_width=resolution.width
image_height=resolution.height
# Create and set RuntimeParameters after opening the camera
runtime_parameters = sl.RuntimeParameters()
runtime_parameters.sensing_mode = sl.SENSING_MODE.STANDARD # Use STANDARD sensing mode
runtime_parameters.measure3D_reference_frame = sl.REFERENCE_FRAME.WORLD
# Setting the depth confidence parameters
runtime_parameters.confidence_threshold = 25
runtime_parameters.textureness_confidence_threshold = 100
image = sl.Mat()
point_cloud = sl.Mat(image_width, image_height, sl.MAT_TYPE.F32_C4, sl.MEM.CPU)
normals=sl.Mat(image_width, image_height, sl.MAT_TYPE.F32_C4, sl.MEM.CPU)
# Enable positional tracking with default parameters
py_transform = sl.Transform() # First create a Transform object for TrackingParameters object
tracking_parameters = sl.PositionalTrackingParameters(_init_pos=py_transform)
err = zed.enable_positional_tracking(tracking_parameters)
if err != sl.ERROR_CODE.SUCCESS:
exit(1)
zed_pose = sl.Pose()
# Enable spatial mapping
mapping_parameters = sl.SpatialMappingParameters(map_type=sl.SPATIAL_MAP_TYPE.FUSED_POINT_CLOUD)
mapping_parameters.set_resolution(sl.MAPPING_RESOLUTION.HIGH)
mapping_parameters.set_range(sl.MAPPING_RANGE.SHORT)
err = zed.enable_spatial_mapping(mapping_parameters)
if err != sl.ERROR_CODE.SUCCESS:
exit(1)
while True:
# A new image is available if grab() returns SUCCESS
if zed.grab(runtime_parameters) == sl.ERROR_CODE.SUCCESS:
zed.get_position(zed_pose, sl.REFERENCE_FRAME.WORLD)
zed.retrieve_measure(point_cloud, sl.MEASURE.XYZRGBA)
zed.retrieve_measure(normals, sl.MEASURE.NORMALS)Hello,
In my opinion, the size of the normal is sqrt(x² + y² + z²), and that should be equal to 1 if the normal is normalized. If you only take the Z component of the normal, it won’t be equal to 1. Isn’t that your problem ?
Bests
Antoine Lassagne
Senior Developer - ZED SDK
Stereolabs Support